


Infinity Gears: 41‑Stage Gearbox Achieving 346 Quintillion‑Year Rotation
Components and supplies
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Necessary tools and machines
|
About this project
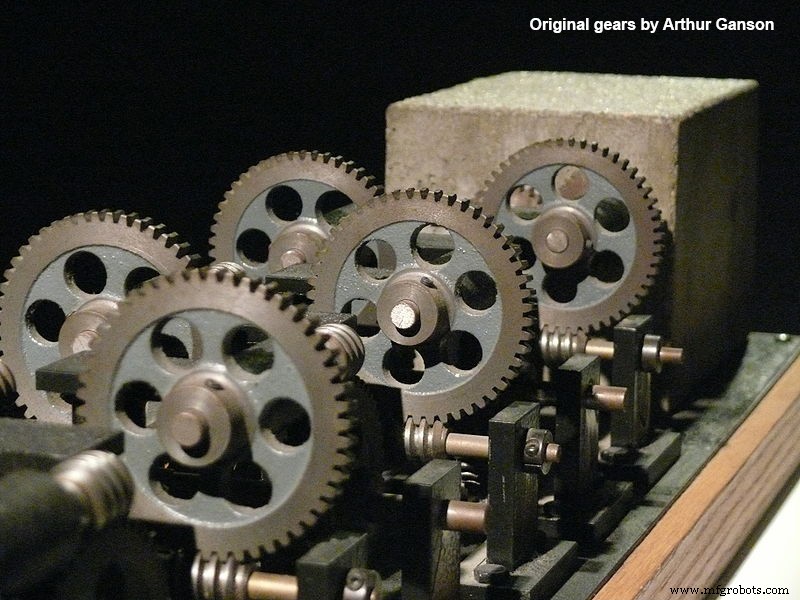
Inspired by Arthur Ganson’s monumental “Machine with Concrete,” the Infinity Gears project condenses 12 stages of 1/50‑ratio gears into a compact, fully‑digital counter system. The original sculpture required 200 rpm to complete a single rotation, translating into an astronomical 13.7 billion years for the final gear. Our design achieves a similar paradox on a smaller scale: a 250 rpm DC geared motor drives the first gear, and the last gear’s rotation time stretches to an unimaginable 346 quintillion years.
By integrating reed switches and LEDs at each stage, we convert mechanical motion into digital counts displayed on a 2×16 LCD controlled by an Arduino Uno. This setup not only demonstrates mechanical amplification but also offers a tangible educational tool for robotics enthusiasts.
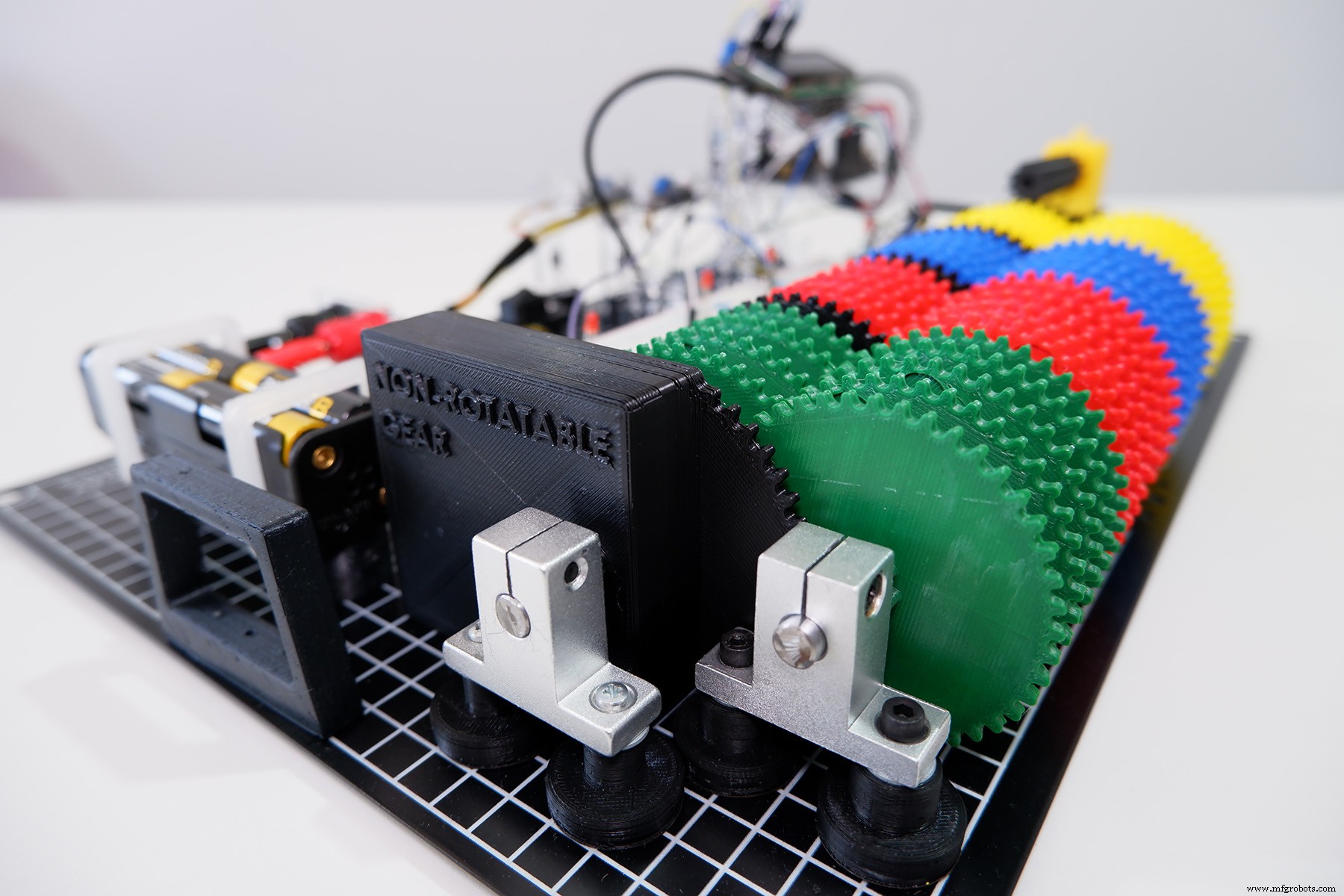
All gears are 3D‑printed in vibrant colors; five black gears host small magnets to trigger the reed switches. The final gear is a non‑rotatable square design, ensuring it remains stationary while the preceding gears complete their counts.
Gear timelines: the first black gear completes a rotation in 0.002 min; the second in 135 days; the third in 3.6 million years; the fourth in 35 trillion years; the final square gear in 346 quintillion years—effectively beyond the age of the universe.
Code
- Arduino Uno Code
Arduino Uno CodeArduino
#include <LiquidCrystal.h> /* Library for LCD control */
LiquidCrystal lcd(12, 11, 5, 4, 3, 2); /* LCD pin mapping */
/* Reed switch inputs */
int reed1 = 6;
int reed2 = 7;
int reed3 = 8;
int reed4 = 9;
int reed_status1, reed_status2, reed_status3, reed_status4;
/* Rotation counters */
int counter1 = 0;
int counter2 = 0;
int counter3 = 0;
int counter4 = 0;
void setup() {
lcd.begin(16, 2); // LCD dimensions
lcd.setCursor(0, 0);
lcd.print("SUNDAY ROBOTICS");
lcd.setCursor(0, 1);
lcd.print(" INFINITE GEARS");
pinMode(reed1, INPUT);
pinMode(reed2, INPUT);
pinMode(reed3, INPUT);
pinMode(reed4, INPUT);
delay(1500); // Splash screen pause
}
void loop() {
reed_status1 = digitalRead(reed1);
reed_status2 = digitalRead(reed2);
reed_status3 = digitalRead(reed3);
reed_status4 = digitalRead(reed4);
if (reed_status1 == 0) {
delay(100);
counter1++;
} else if (reed_status2 == 0) {
delay(100);
counter2++;
} else if (reed_status3 == 0) {
delay(100);
counter3++;
} else if (reed_status4 == 0) {
delay(100);
counter4++;
}
}
void displayCounts() {
lcd.clear();
lcd.setCursor(0, 0);
lcd.print(" INFINITE GEARS");
lcd.setCursor(0, 1);
lcd.print("F:");
lcd.print(counter1);
lcd.print(" S:");
lcd.print(counter2);
lcd.print(" T:");
lcd.print(counter3);
lcd.print(" F:");
lcd.print(counter4);
}
Custom parts and enclosures
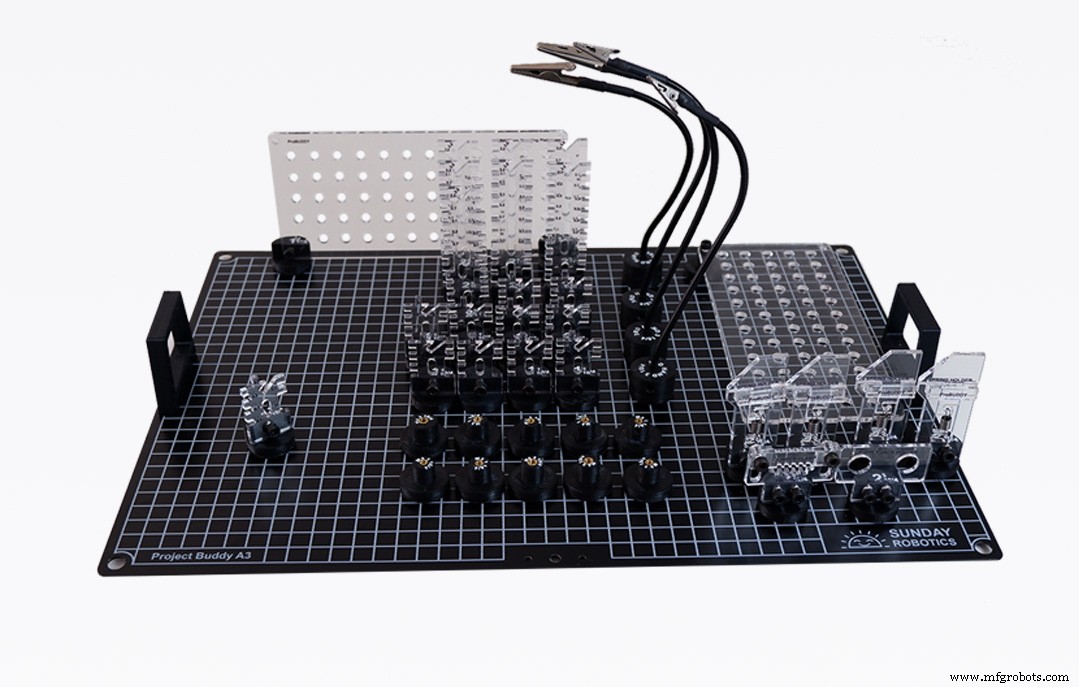
We engineered 41 spur gears plus a motor gear, each with 45 outer teeth and 9 inner teeth; the motor gear also has 9 teeth. The gear ratio per stage is 1:5, yielding an overall ratio of 1/(5^41). The motor’s full rotation time is 1/250 min, so the last square gear would require (1/250) × (5^41) ≈ 1.8×10^26 min, equivalent to 3.03×10^24 h, 1.26×10^23 days, or 3.46×10^20 years—346 quintillion years.
Schematics
The system is powered by eight AA alkaline batteries in series, delivering 8 V. A 6 V DC motor and a 5 V Arduino Uno (plus LCD and peripherals) are powered via two LM2596 buck regulators.
Each black gear contains a magnet. When a magnet passes a reed switch, the Arduino receives a low pulse, triggering the corresponding counter increment. An LED and resistor provide visual feedback on the switch status.
The 2×16 character LCD displays the cumulative counts for each gear stage.

Manufacturing process
- Gear System Insights: Backlash, Breathers, Oil Selection & Load Management
- Parallel vs. Crossed Helical Gears: Key Differences Explained
- Understanding Gear Cutting: Types and Processes Explained
- Industries That Depend on Regular Bevel Gear Maintenance
- Gear Manufacturing Fundamentals: Expert Guide to Gear Production Processes
- Understanding Gear Speed: How Gear Size and RPM Shape Power Transfer
- Choosing Between Helical Gears and Helical Rack & Pinion Systems
- Understanding Planetary Gear Reduction: Compact, High‑Torque Solutions
- Spur Gear Reducers Explained: Design, Function, and Industrial Applications
- Understanding the Various Types of Gear Mechanisms