


Enhancing Robot Versatility with Advanced End-Effectors (EOATs)
Selecting the proper EOAT to increase versatility is based on end-user’s needs and familiarity of the robot integrator. End-effectors are available in both angular and parallel style and are actuated electrically, hydraulically, mechanically, or pneumatically. Pneumatic EOATs are used in the majority of tooling, and also accommodate most packaging applications because of their weight-to-power ratio. However, they also provide less control over grip forces and are less flexible than electric EOATs. Hydraulic EOATs can generate high clamping forces and can actuate quickly. A certain type of end-effector should be chosen depending on power consumption, size, complexity, weight, and requirements.
Further, the style of tooling that best suits a particular application must be considered. If products will change frequently, the end-effector should be capable of adding fingers to adapt (two or three fingers can form a stable grip). Adaptive grippers promote production and packaging due to the automatically adjusting EOATs. Parallel EOATs are a smart choice when working with well-defined non-compliant products.
With EOAT becoming more powerful, random bin picking is becoming a mainstream application for robots. This is essential as manufacturers strive to stay ahead of the curve in their industries. Vision-guided robots are equipped with appropriate tooling to pick randomly oriented parts from a bin and place them down for the next step in the process. The tooling must be able to cover a wide range of products and processes, and advanced EOAT is making this a reality.
EOATs also must be versatile in the types of items and appliances that are handled during the manufacturing or packaging process. Some items require a light touch and must be handled delicately. Pneumatic grippers can be adjusted to decrease the force of their grips.
The robotics market is trending towards hybrid tooling: the end-effector can perform a wide range of tasks by using several tools. Engineers no longer have to use only one tooling technology to meet an end-user’s needs.
RobotWorx offers a wide variety of EOAT for many brands of industrial robots. If you are interested in purchasing end-of-arm-tooling for your robot, or need a fully integrated robotic system, contact us today online or at 877-762-6881.
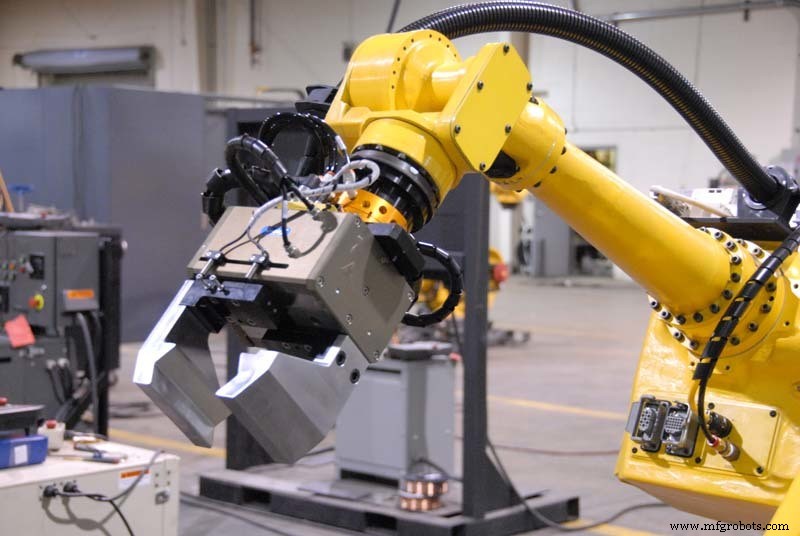
Industrial robot
- 3 Key Trends in Robotic End‑of‑Arm Tooling You Must Know
- Choosing the Right End‑Effector: Boosting Industrial Robot Performance
- Optimizing End‑of‑Arm Tooling for Peak Robot Performance
- Enhance Robotic Precision with ATI Axia80 Force/Torque Sensor
- Arno Fast Change System: Boost Spindle Uptime & Reduce Tooling Downtime
- Building Industrial Robot End‑of‑Arm Tooling: A Practical Guide
- Enhancing Robot Versatility with Advanced End-Effectors (EOATs)
- Robotic Automation Enhances Versatility in Food Production
- How End‑of‑Arm Tooling Enhances Robotic Deburring Performance
- Standard vs. Custom End-of-Arm Tooling: Which Choice Boosts Your Robotics Efficiency?