


Ethernet: The Backbone of Autonomous Vehicle Reliability
A seismic shift is underway in the automotive sector. Fifteen years ago, a commercial showing a self‑driving car was pure science fiction. Today, companies like Waymo have tested hundreds of vehicles in real‑world field trials, proving that autonomous driving is feasible. The prevailing expectation that the technology would mature in 15–20 years is rapidly becoming outdated. Capital inflows are now astronomical, and legislators are crafting the legal and regulatory frameworks that will underpin autonomous mobility.
Trust remains the single largest hurdle for mass adoption. The National Safety Council reports that over 100 fatal accidents occur daily in the United States—an under‑reported figure that rarely makes headlines. In contrast, a single incident involving a Tesla or Uber vehicle frequently dominates the news, sowing widespread apprehension. Yet the National Highway Traffic Safety Administration’s accident data reveals that during the first year Tesla’s Autopilot (auto‑steering) debuted, accident rates involving Tesla vehicles fell by 40%—before the subsequent software refinements that followed its commercial release.
According to the U.S. Department of Transportation, autonomous vehicles could slash traffic fatalities by 94% by eliminating human‑error incidents.
Achieving this level of safety requires extreme reliability at every layer. The system’s “brain” is an SoC/GPU that runs AI algorithms to interpret a 360° view of the road and determine the appropriate driving policy. This is complemented by the car’s “eyes and ears”—high‑resolution cameras, lidar, radar, and ultrasonic sensors—that must operate flawlessly in every extreme condition, from midnight to blizzard, and from scorching heat to sub‑freezing temperatures.
The next critical component is the in‑vehicle network (IVN), the nervous system that ferries data between all nodes. It must deliver high bandwidth, low latency, and built‑in redundancy to ensure zero failures in safety‑critical scenarios.
As vehicles advance from Level 1–2 to Level 3–4, and ultimately Level 5, the speed and complexity of the IVN grow in tandem, as illustrated in Figure 1.
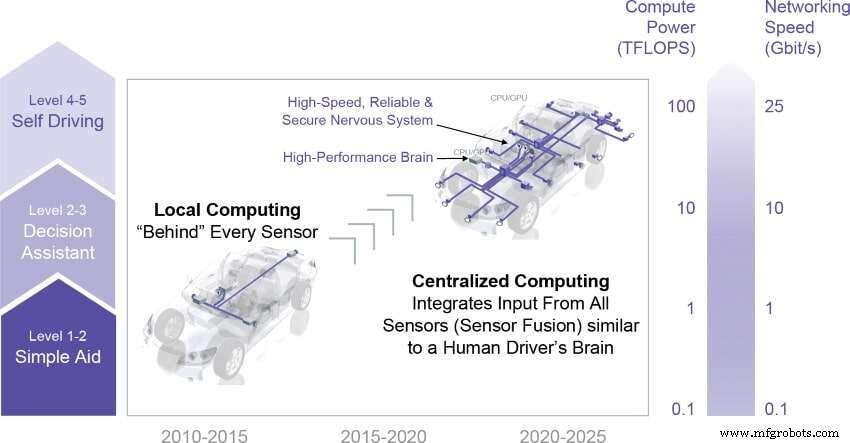
Figure 1. The Path Towards Full Autonomy
Level 1–2 vehicles equipped with Advanced Driver Assistance Systems (ADAS) typically rely on one to three low‑resolution cameras and a basic controller that handles minimal tasks such as braking and speed regulation. In contrast, Level 4–5 systems resemble a mobile data center, deploying 10–20+ cameras and sensors along with multiple centralized computing units that manage vision analytics, driving policy, high‑bandwidth telematics, and advanced storage—all interconnected via a robust network that guarantees the required speed, quality‑of‑service (QoS), and security.
For three decades, numerous protocols have evolved to meet the IVN demands of Level 1–2 vehicles. In recent years, a handful of proprietary solutions emerged to address Level 3–4–5 requirements. As the industry crystallized the network specifications for future cars, OEMs and Tier‑1 suppliers converged on Ethernet, recognizing it as the most capable technology to satisfy the speed, scalability, and reliability needs of next‑generation autonomous networks.
Internet of Things Technology
- From Prototype to Production: Building Tomorrow’s Autonomous Vehicles
- Advancing Autonomous Driving: How Next‑Gen Sensors Are Pushing the Limits
- The Key to Reliability Success: Culture Change Over Technology
- Autonomous Vehicles: Telecom Operators’ New Frontier in Passenger Entertainment
- Mercedes Accelerates Autonomous Commercial Vehicle Systems, Bringing Self‑Driving Trucks to Market
- Driving Innovation: How Edge Computing Is Transforming the Automotive Industry
- Are We Ready for Level‑4 Autonomous Vehicles?
- Driving Forward: How Autonomous Vehicles Stay on Course to Success
- Automotive PCBs: The Backbone of Reliable Vehicle Performance
- The Future of Autonomous Vehicles: Technology, Challenges, and Innovations