


Choosing Between Hardware Accelerators and DSPs: A Practical Guide
In my first two posts I explained why digital signal processors (DSPs) are increasingly replacing custom hardware accelerators (HWAs). This article offers a concrete framework to help you decide whether a DSP or an HWA is the right choice for your next project.
DSPs shine in applications that require heavy mathematical work—modems, audio, radar for autonomous vehicles, and global navigation satellite systems (GNSS). They can perform the same signal‑processing tasks that a dedicated HWA would, but in software. This brings two key advantages: greater flexibility to adapt to evolving standards and the ability to bundle multiple accelerators onto a single processor, reducing cost and silicon area.
Consider GPS, GLONASS, Galileo, and BeiDou. A hard‑wired GPS HWA may be fast, but it limits you to one constellation. Running the same algorithms on a DSP lets you support all four systems without redesigning hardware, simply by updating firmware.
How does a DSP stack up against a custom HWA in terms of performance? Let’s walk through a common scenario: an NB‑IoT device that must finish all physical‑layer processing, L1 control code, and protocol stack within a 1 ms sub‑frame. At 100 MHz, the processor has 100,000 cycles to work with.
To estimate whether a DSP can meet this deadline, partner with an embedded DSP vendor that already provides benchmarked software for your target application. They’ll give you a cycle‑count curve—each point shows the cycles needed for a given load, plotted against the peak cycles allowed at your chosen frequency.
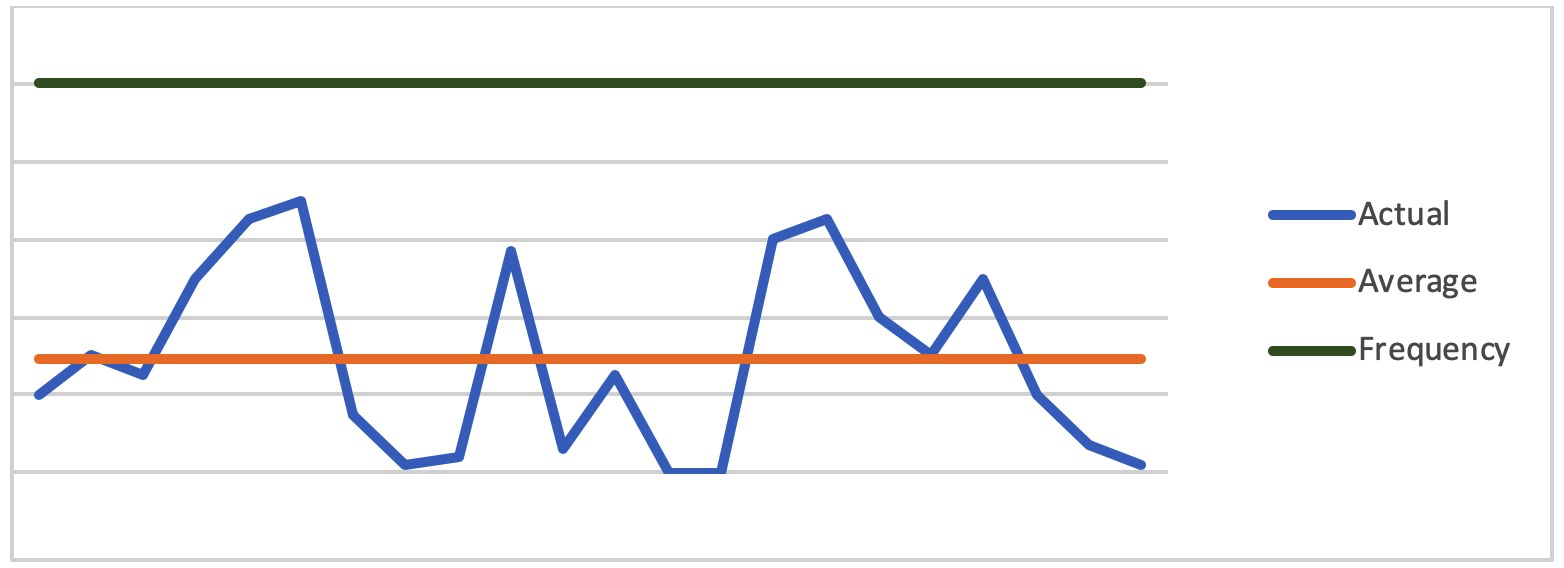
(Source: CEVA)
This curve lets you see if your target frequency leaves enough headroom or if you need to raise the clock, mindful that higher frequency increases area and power.
Power estimation is equally straightforward. Split the workload into control code (general‑purpose logic) and DSP code (parallel MAC units, vector operations). A typical split is 40 % control, 60 % DSP. If a vendor quotes 2 mW for control and 4 mW for DSP at 100 MHz, and your DSP runs at 50 % average activity, the average power is:
(0.4 × 2 mW + 0.6 × 4 mW) × 0.5 = 1.6 mW.
With these estimates, you can confidently assess whether a DSP meets your latency and power targets. If you have ample headroom, you can migrate more functions to the DSP or add features like multi‑constellation GNSS. If not, you may need to increase frequency or consider a hybrid approach.
In short, a DSP offers a flexible, cost‑effective path that can rival or surpass a custom hardware accelerator, especially when future‑proofing and rapid feature updates are priorities.
Embedded
- Understanding Polarity and Phase in AC Circuit Analysis
- Facebook Engineers Open‑Source Precision Time Appliance for Data Centers
- When a DSP Outperforms a Hardware Accelerator
- How Hardware Accelerators Power Modern AI Systems
- EnSilica Unveils eSi‑MediSense: First Single‑Chip Medical Sensor with Integrated ML Accelerator
- Multi-Material Plastic Hardware Solutions for Industrial & Medical Applications
- Sinergia Tech Secures $500k to Launch Latin America’s First Hardware Accelerator
- Maximizing Manufacturing Productivity: Strategies for Success
- Understanding Human-Machine Interfaces (HMIs) in Modern Industry
- Build an Arduino Proximity Sensor: Step‑by‑Step Guide with Components