


Build a Wireless IR‑Sensor‑Driven Robotic Vehicle
A robotic vehicle combines electromechanical design with intelligent control, enabling autonomous or semi‑autonomous operation. This guide focuses on a wireless system powered by infrared (IR) sensors and radio‑frequency (RF) communication.
What Is a Wireless Robotic Vehicle?
Wireless robotic vehicles are automated machines that can be operated remotely, often through RF or IR links. They are increasingly used in hazardous environments, industrial automation, and educational projects. By integrating sensors and microcontrollers, these robots can navigate, avoid obstacles, and perform tasks without direct human intervention.
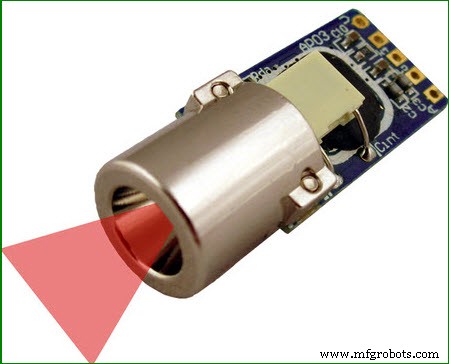
How IR Sensors Work
An IR sensor emits infrared light from an LED and detects reflected radiation with a photodiode. The sensor’s output voltage varies with the amount of IR light received, allowing it to detect proximity, line boundaries, or obstacles. Common variants include line‑following sensors, proximity detectors, and obstacle counters.
RF Remote‑Controlled Wireless Robot
The core of the wireless system is a 433 MHz RF transmitter and receiver pair. Both modules are compact, operating at 3 V‑12 V and drawing minimal current (4.5 mA when active).
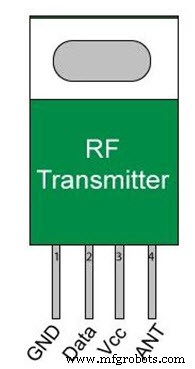
RF Transmitter
The transmitter is driven by pushbuttons that send logic‑high signals to control direction (forward, backward, left, right). It is powered by 3 V‑6 V and can output up to 12 V. The circuit diagram below illustrates the button connections.
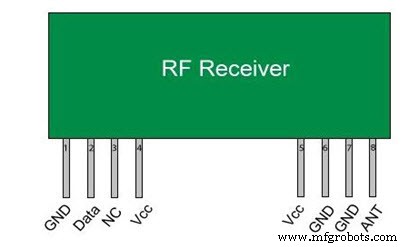
RF Receiver
Operating at 5 V, the receiver consumes 3.5 mA. It decodes the RF signal and forwards the command to an 8051 microcontroller, which then drives the motors.
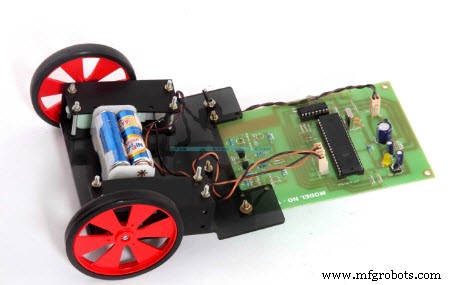
System Architecture
The robot’s control logic resides in an 8051 microcontroller. An IR receiver decodes the TV remote’s RC5 signals, while the RF receiver interprets commands from the transmitter. Motor drivers translate these signals into DC motor actions, enabling four‑directional movement.

The RF remote offers a practical range of up to 200 m with an appropriate antenna, surpassing typical IR distances. For longer‑range control, integrating DTMF or cellular RF modules can further extend capabilities.
With this foundation, you can experiment with advanced features such as autonomous navigation, obstacle avoidance, or even smartphone‑based control.
Have questions about designing or troubleshooting this system? Share your thoughts in the comments. By the way, what’s the primary role of the IR sensor in this setup?
Sensor
- Advancing Autonomous Driving: How Next‑Gen Sensors Are Pushing the Limits
- Building an Interactive Laser Projector with Zigbee Sensors and Gravio Edge Platform
- Create a Stunning Monitor Ambilight System with Arduino
- Wireless Arduino Programming Shield with HC-05 Bluetooth – No USB Needed
- Precise EMG-Controlled Robotic Hand: InMoov Integration & Build Guide
- Advancing Fog‑Safe Transport: Sandia Labs Tests Sensors for Autonomous Vehicles
- Bio-Inspired Electronic Skin Sensors for Precise Motion Tracking
- Revolutionary Ultra‑Thin MXene Strain Sensors Enhance Robotic Arm Precision and Safety
- Ultra‑Thin, Battery‑Free MXene Strain Sensors Revolutionize Industrial Robotic Arms
- 3D Printing a Protective Mask: A Step-by-Step Guide