


Linearizing Resistive Sensor Bridges with Two Proven Hardware Methods
Measuring minuscule resistance changes in sensors can be daunting. This article presents two hardware techniques that eliminate bridge non‑linearity errors, improving accuracy and calibration simplicity.
The resistance of a resistive sensor changes in response to a physical variable such as temperature or force. The percentage change is typically tiny – for instance, a strain gauge may vary by less than 1 % over its entire range.
Accurate measurement of such small changes demands a highly precise circuit. Bridge configurations make this easier, but even a linear sensor can produce a non‑linear bridge output.
Software or hardware methods can correct this non‑linearity. Below, we explore two proven hardware approaches.
Bridge Non‑linearity of Resistive Sensors
Consider a pressure sensor with a linear response:
Rsensor = R0 + Mx
Assuming the slope M equals the initial resistance R0, the response simplifies to R0(1 + x).
Using a standard bridge (Figure 1), where the other three resistors equal R0, maximizes sensitivity. The bridge output is:
Vout = Vr \(\left(\dfrac{R_0(1+x)}{R_0+R_0(1+x)} - \dfrac{1}{2}\right)\)
which reduces to
Vout = Vr \(\dfrac{x}{2(2+x)}\) (Equation 1)
Because the relationship is non‑linear, for small x (x ≪ 2) we can approximate:
Vout ≈ Vr \(\dfrac{x}{4}\) (Equation 2)
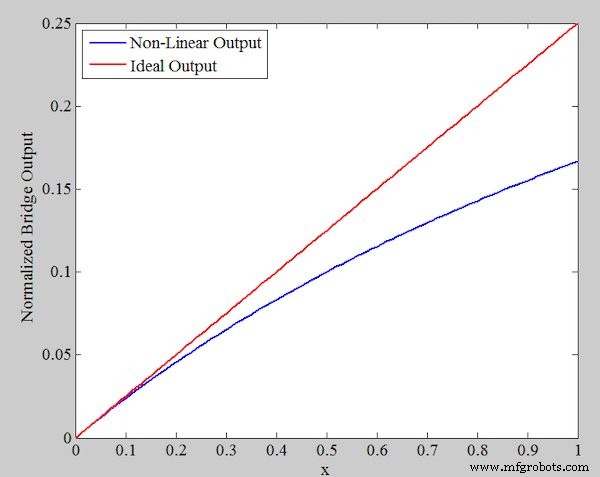
Figure 2 shows the normalized output $V_{out}/V_{r}$ for both equations, illustrating how deviation grows with x.
Quantifying Non‑linearity Error
Rewriting Equation 1:
Vout = Vr \(\dfrac{x}{4}\) \(\dfrac{1}{1 + \dfrac{x}{2}}\)
Assuming $x/2 \ll 1$, a Taylor expansion gives:
Vout ≈ Vr \(\dfrac{x}{4}\) (1 – \(\dfrac{x}{2}\))
Comparing with Equation 2, the absolute non‑linearity error is
ENon‑Linearity = Vr \(\dfrac{x}{4}\) \(\dfrac{x}{2}\)
Expressed as a percentage of the ideal value:
Percentage Error = \(\dfrac{x}{2} \times 100\%\)
Example
For a sensor with R0 = 100 Ω and maximum x = 0.01, the peak linearity error is
Percentage Error = \(\dfrac{0.01}{2} \times 100\% = 0.5\%\)
While software compensation is possible, a linear bridge output directly improves measurement precision and eases calibration.
Method 1: Voltage Proportional to Resistance Change
Figure 3 illustrates the first linearization circuit.
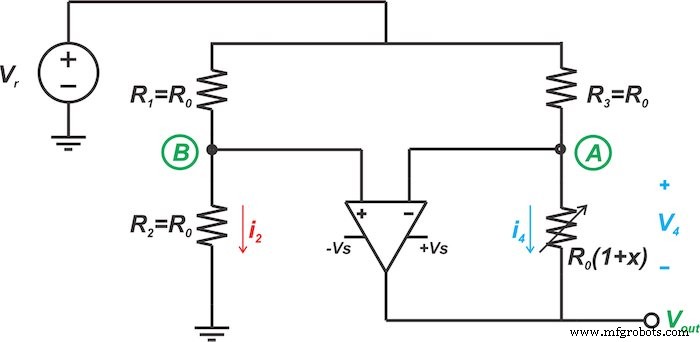
By forcing a constant reference current $I_{Ref}$ through the sensor (Figure 4), the sensor voltage becomes
Vsensor = IRef · R0(1 + x)
Rearranged:
Vsensor = R0 IRef + R0 IRef x
The first term is constant; the second is linear in x. The op‑amp in Figure 3 keeps node B at $V_{r}/2$, forcing a constant current $V_{r}/(2R_{0})$ through the sensor. Consequently, the output is
Vout = -\(\dfrac{V_{r}}{2}\) x
which is a clean linear function of x.
Method 2: Current Proportional to Resistance Change
Figure 5 presents the second approach.
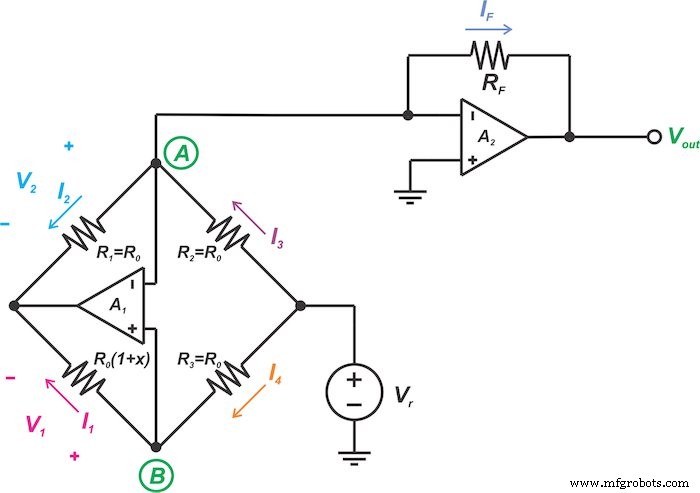
In this design, branch 1 carries a current proportional to the sensor resistance:
I1 = IRef · R0(1 + x)
Branch 2 supplies a constant current $I_{Ref} R_{0}$, so the differential current in branch 3 is $I_{Ref} R_{0} x$. Using two op‑amps with identical inputs, the circuit subtracts the constant term and outputs
Vout = Vr \(\dfrac{R_{F}}{R_{0}}\) x
Choosing the ratio $R_{F}/R_{0}$ allows arbitrary gain. Although this method requires an extra op‑amp, it offers flexible scaling.
To explore more in‑depth articles, please visit my article list.
Sensor
- How Bridges Stabilize Overhangs in 3D Printing
- Draw Bridges: Engineering, History, and Modern Innovations
- Concrete Beam Bridge: Design, Construction, and Future Trends
- In‑Display Fingerprint Sensor: Evolution, Technology, and Benefits
- DS18B20 Temperature Sensor – Precise 1‑Wire Digital Thermometer for Industrial & Consumer Use
- STMicroelectronics Unveils Advanced Time‑of‑Flight Sensor for Precise Ranging
- AIT Bridges Launches Advanced Composite Tub Girder System
- Dual-Mode Electronic Skin: Touchless and Tactile Sensing via Magnetic Fields
- Advanced TOMOPLEX Sensor Film for Real-Time Aerospace Monitoring
- Designing Pedestrian Bridges with Structural Steel: A Modern Construction Approach