


Which LiDAR Wavelength Will Dominate Automotive Applications?
In the rapidly evolving landscape of advanced driver assistance systems (ADAS) and autonomous vehicles, the choice of LiDAR wavelength is a pivotal decision that shapes performance, cost, and safety. This article examines the technical, market, and economic factors driving the current preference for near‑infrared (NIR) LiDAR over short‑wave infrared (SWIR) and provides an evidence‑based perspective on which wavelength is likely to prevail.
Sensor Fusion: The Backbone of Autonomous Perception
ADAS and autonomous driving rely on a trio of complementary sensors: cameras, radar, and LiDAR. Each modality contributes unique strengths—visual detail from cameras, velocity data from radar, and precise 3‑D depth from LiDAR. By fusing these streams, vehicles can construct a robust, redundant perception model that is essential for life‑critical decision making.
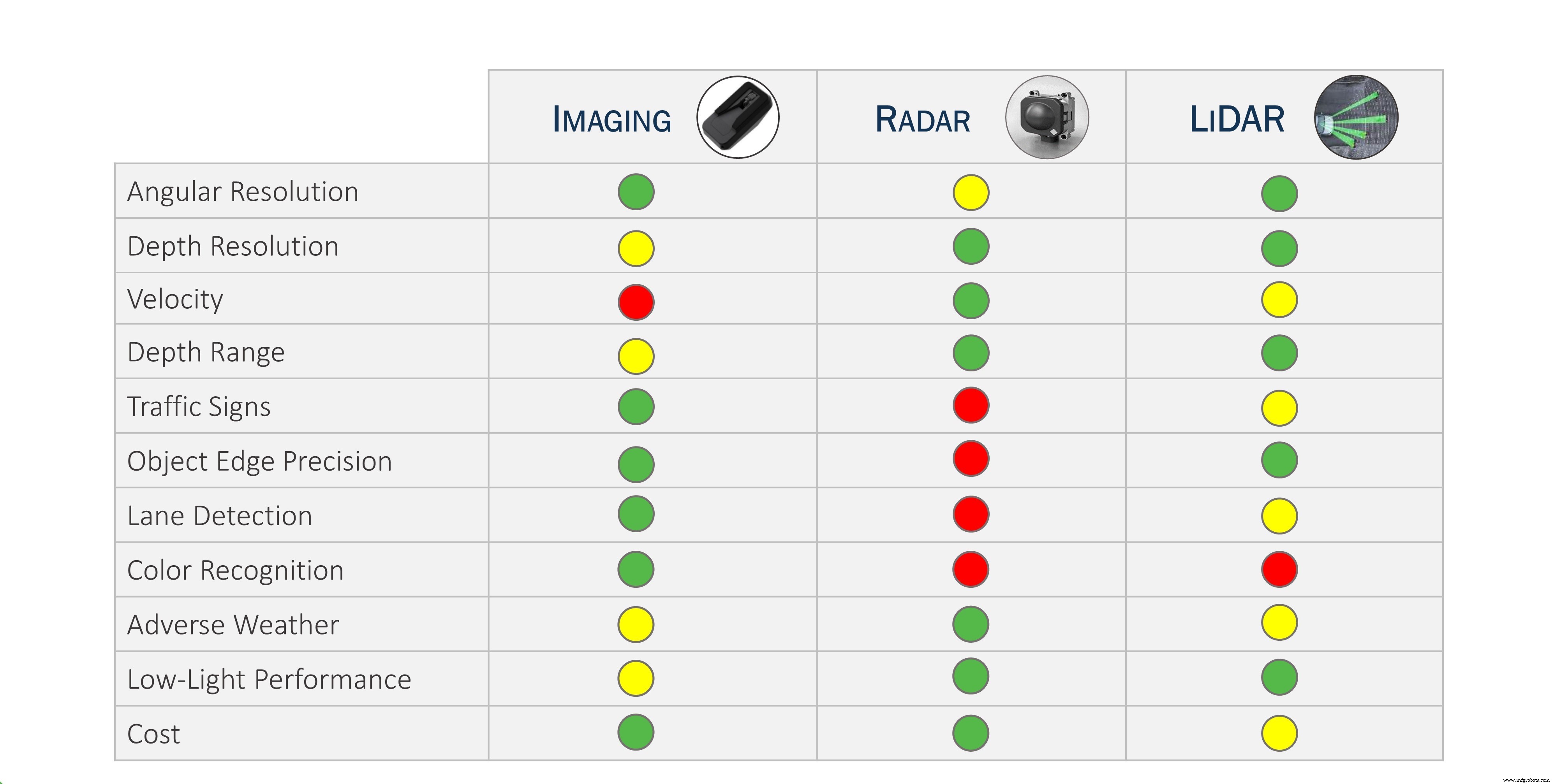
Figure 1: Fusion of camera, radar, and LiDAR data delivers comprehensive situational awareness.
LiDAR Market Dynamics
Automotive LiDAR is poised for explosive growth, rising from $39 million in 2020 to a projected $1.75 billion by 2025, according to Yole Développement. Over 100 companies now compete in the space, with cumulative investments exceeding $1.5 billion by 2020—far ahead of the influx of SPAC‑driven IPOs that followed. Such concentration suggests inevitable consolidation, as history shows with Ethernet and VHS.
Vehicle OEMs demand sensors that are low‑cost, highly reliable, and capable of detecting low‑reflectivity targets. When a supplier meets these criteria, OEMs are largely indifferent to the underlying wavelength technology. The question therefore becomes: which wavelength will dominate?
LiDAR Architectures: Direct Time‑of‑Flight vs. Frequency‑Modulated Continuous Wave
Direct time‑of‑flight (dToF) LiDAR remains the industry standard. It emits short laser pulses and calculates distance by measuring return time, a straightforward application of the speed‑of‑light principle. Frequency‑modulated continuous wave (FMCW) LiDAR, also known as coherent LiDAR, mixes transmitted and reflected signals to simultaneously extract range and velocity. FMCW offers compelling advantages but is less common due to higher complexity and cost.
Figure 2 illustrates a typical dToF block diagram, highlighting the laser, optical transmitter/receiver, detector, and signal‑processing chain.
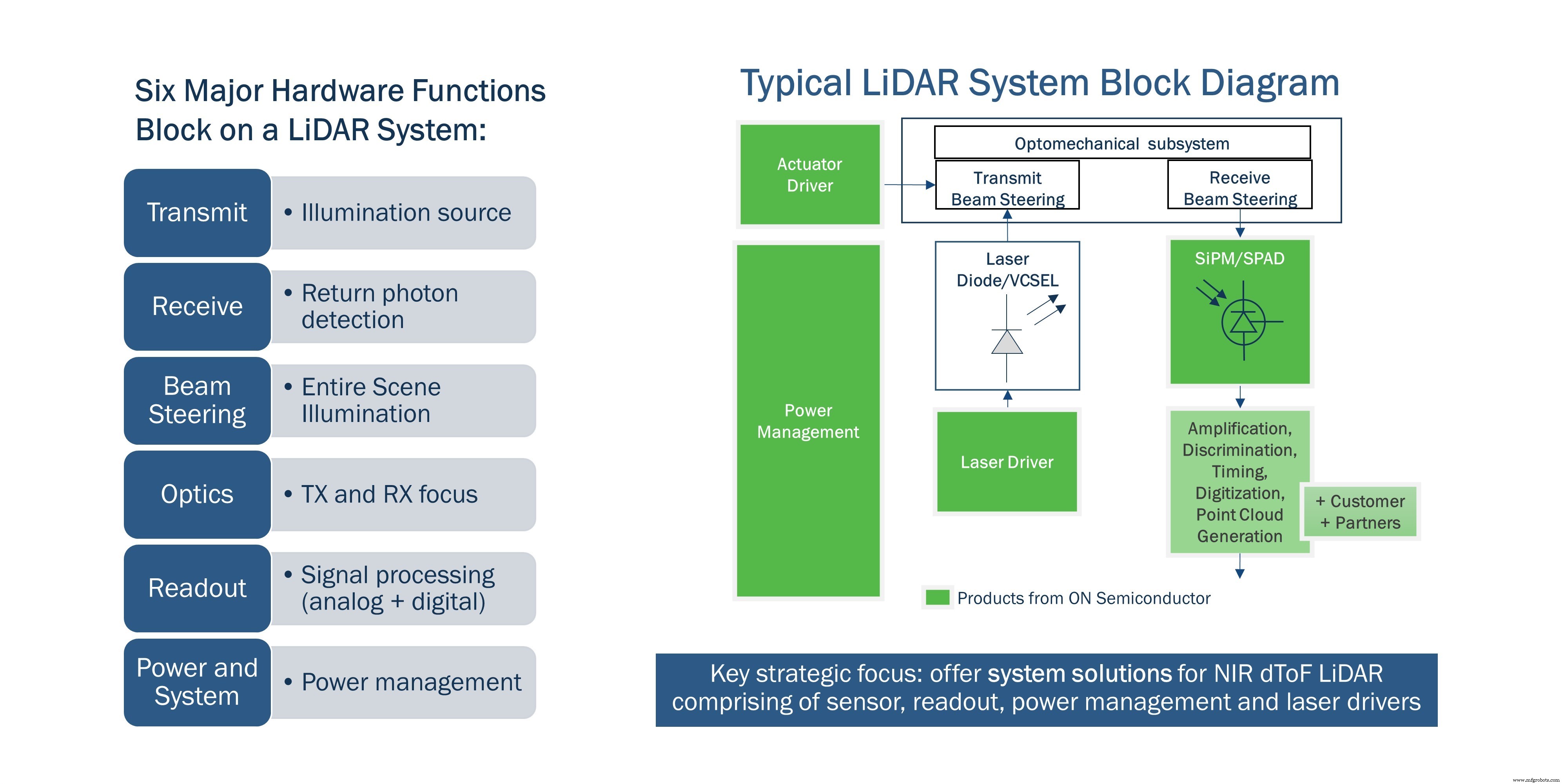
Figure 2: Core components of a dToF LiDAR system.
Manufacturers and Wavelength Choices
Most commercial LiDARs operate at NIR wavelengths (around 905 nm) because silicon‑based photodetectors and GaAs lasers are inexpensive and mature. A minority of firms target SWIR (1.5 µm) wavelengths to exploit higher eye‑safety margins and potentially longer range. Table 1 lists key players, distinguishing between NIR and SWIR portfolios.
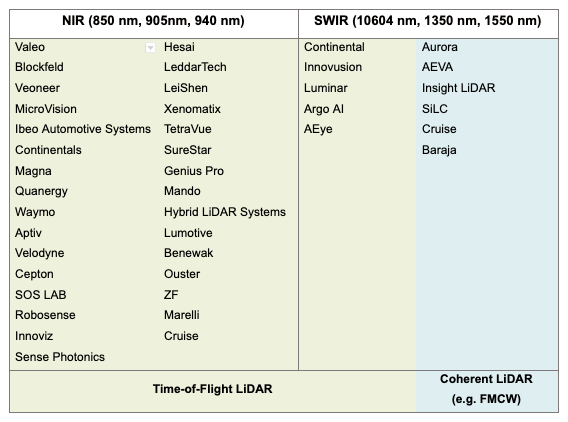
Table 1: Selected LiDAR manufacturers and their wavelength focus.
Several physical factors influence this distribution:
- Solar irradiance is roughly three times higher at 905 nm than at 1550 nm, raising ambient noise for NIR systems.
- Silicon photodiodes, which dominate NIR detection, can be fabricated at scale on CMOS foundries, reducing cost and improving yield.
- III/V materials (InGaAs, InGaAsP) required for SWIR sensors and lasers are costly, have lower wafer yields, and lack mature supply chains.
Photodetector Technologies
Photodetectors convert incident photons into electrical signals. PIN photodiodes, early LiDAR sensors, offer no internal gain and struggle with weak returns. Avalanche photodiodes (APDs) provide moderate gain but require high bias and suffer from non‑uniformity. The current industry leader is the single‑photon avalanche diode (SPAD), delivering high gain and enabling photon‑counting. Silicon‑based SPAD arrays (SiPMs) are increasingly common in NIR LiDAR, while SWIR SPADs remain nascent due to integration challenges.
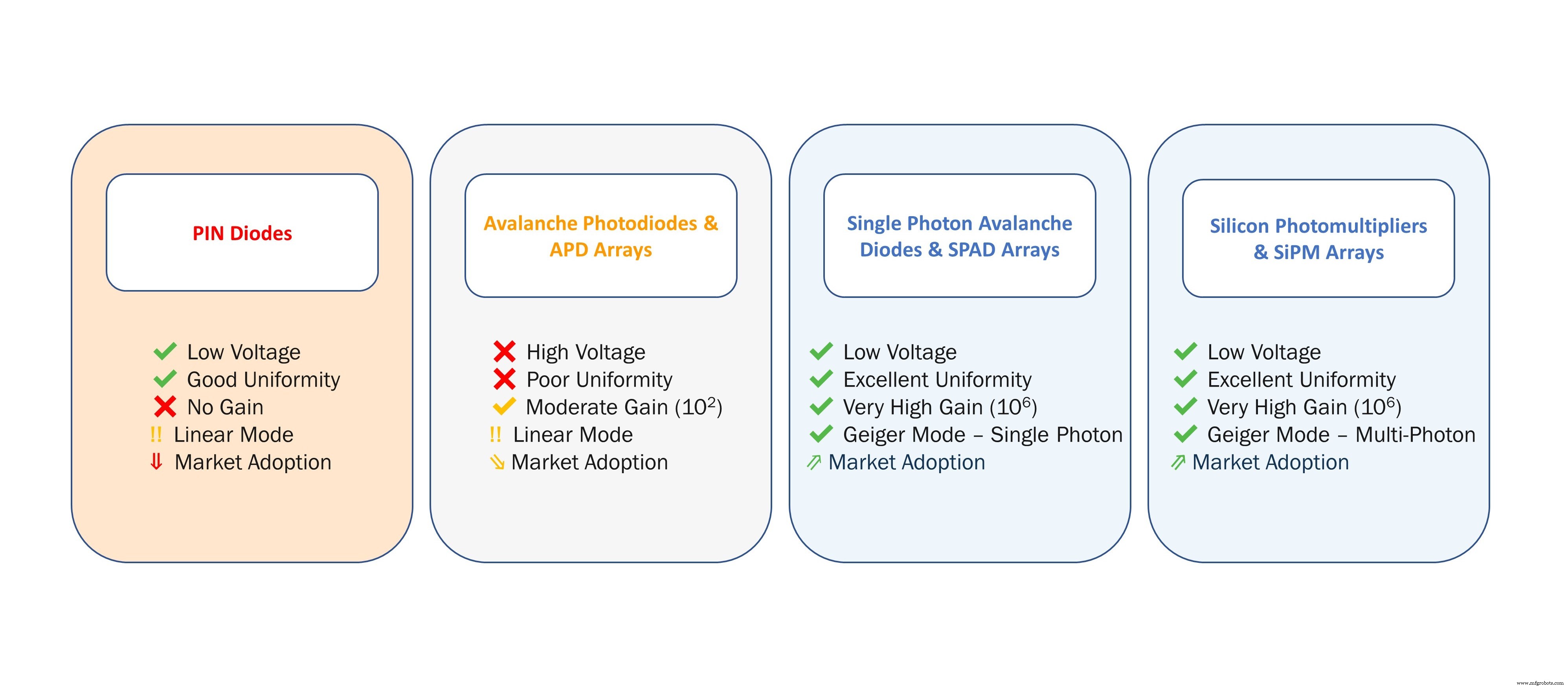
Figure 4: Evolution of photodetectors used in LiDAR.
Laser Sources
Two laser architectures dominate the market:
- Edge‑emitting lasers (EELs)—cost‑effective, high output, but challenging to array and exhibit temperature‑driven wavelength drift.
- Vertical‑cavity surface‑emitting lasers (VCSELs)—top‑emitting, easier to pack into arrays, and becoming more efficient, though currently pricier.
Both EELs and VCSELs are available at NIR (GaAs) and SWIR (InGaAsP) wavelengths, but GaAs wafers are larger and cheaper, giving NIR an edge in production economics.
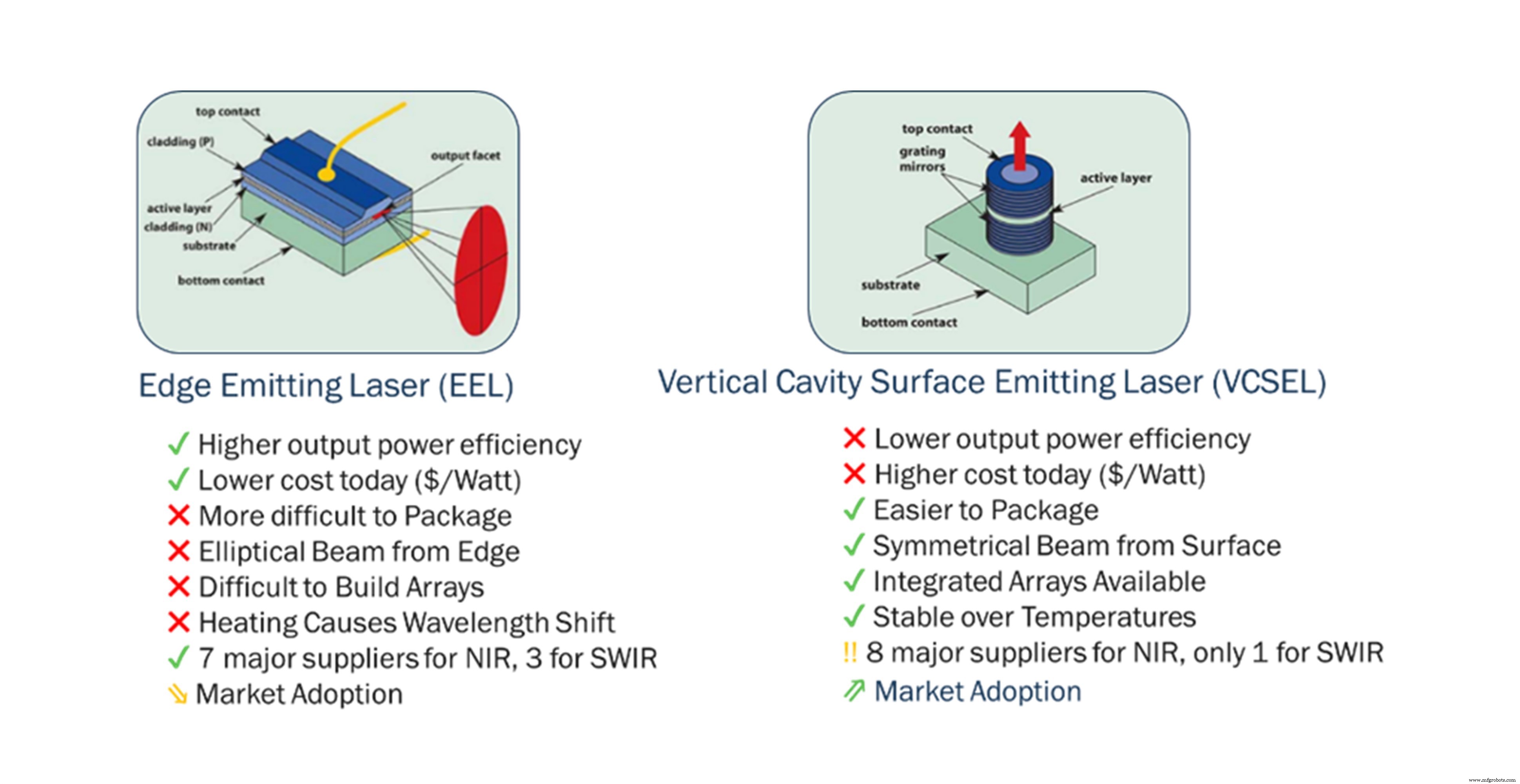
Figure 5: Edge‑emitting vs. VCSEL laser structures.
Eye‑Safety Considerations
IEC‑60825 specifies permissible exposure limits. NIR light penetrates the cornea to reach the retina, demanding stricter limits than SWIR, which is largely absorbed in the cornea. Consequently, a 1550 nm LiDAR can safely emit higher peak powers, improving photon return. Nonetheless, compliant design must account for pulse energy and beam divergence regardless of wavelength.
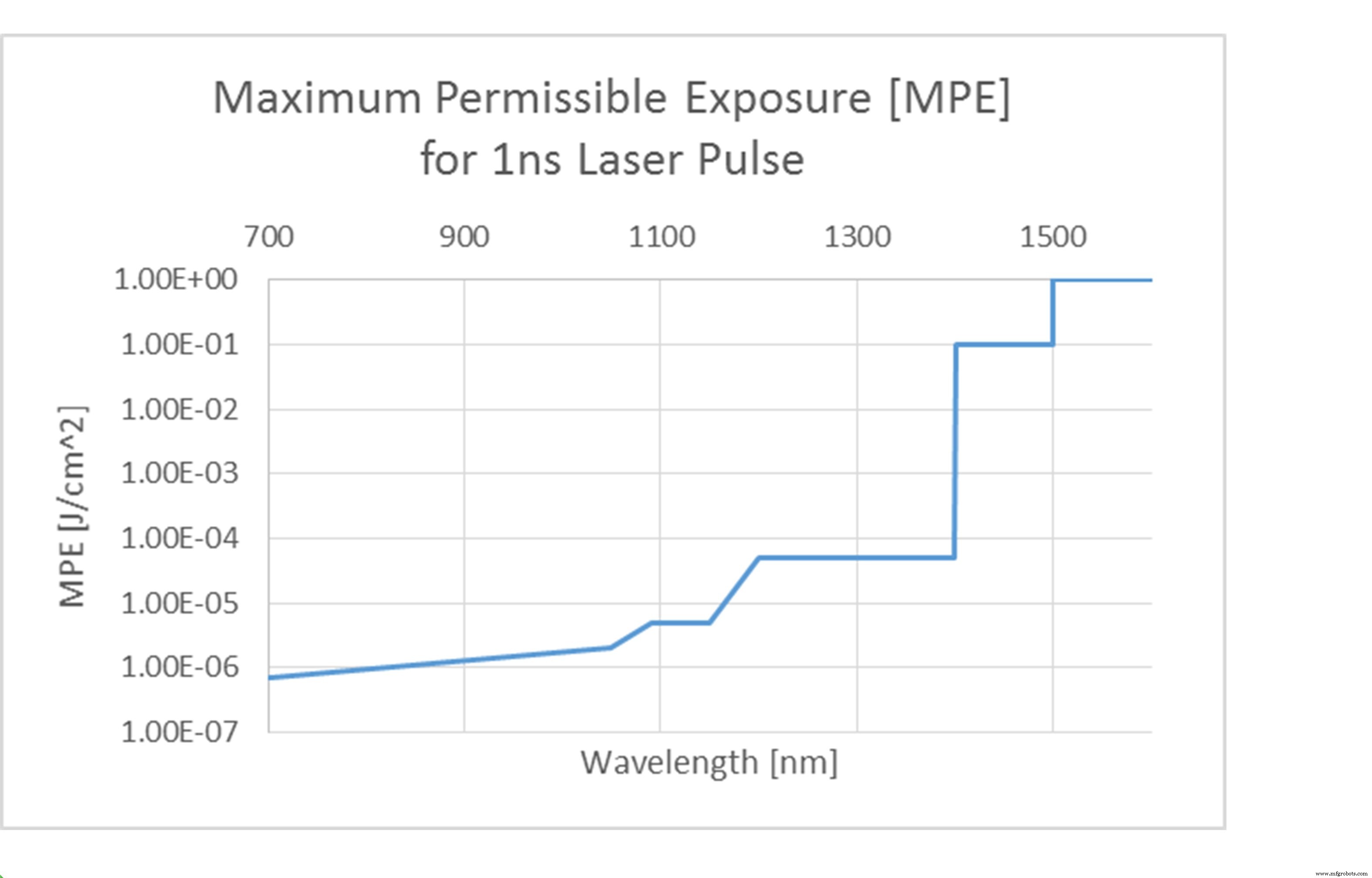
Figure 6: IEC‑60825 eye‑safe exposure limits.
Performance Comparison
System‑level modeling of identical dToF architectures—using 16‑channel detectors and 80° horizontal sweep—shows:
- A 1550 nm LiDAR achieves ~500 m range for low‑reflectivity targets with 99% probability.
- A 905 nm LiDAR maintains >200 m range under the same conditions.
- SWIR’s performance degrades faster in rain/fog due to higher water absorption.
Figure 10 presents the simulation data, confirming that NIR LiDAR meets automotive long‑range requirements while SWIR offers marginal gains that may not justify the cost.
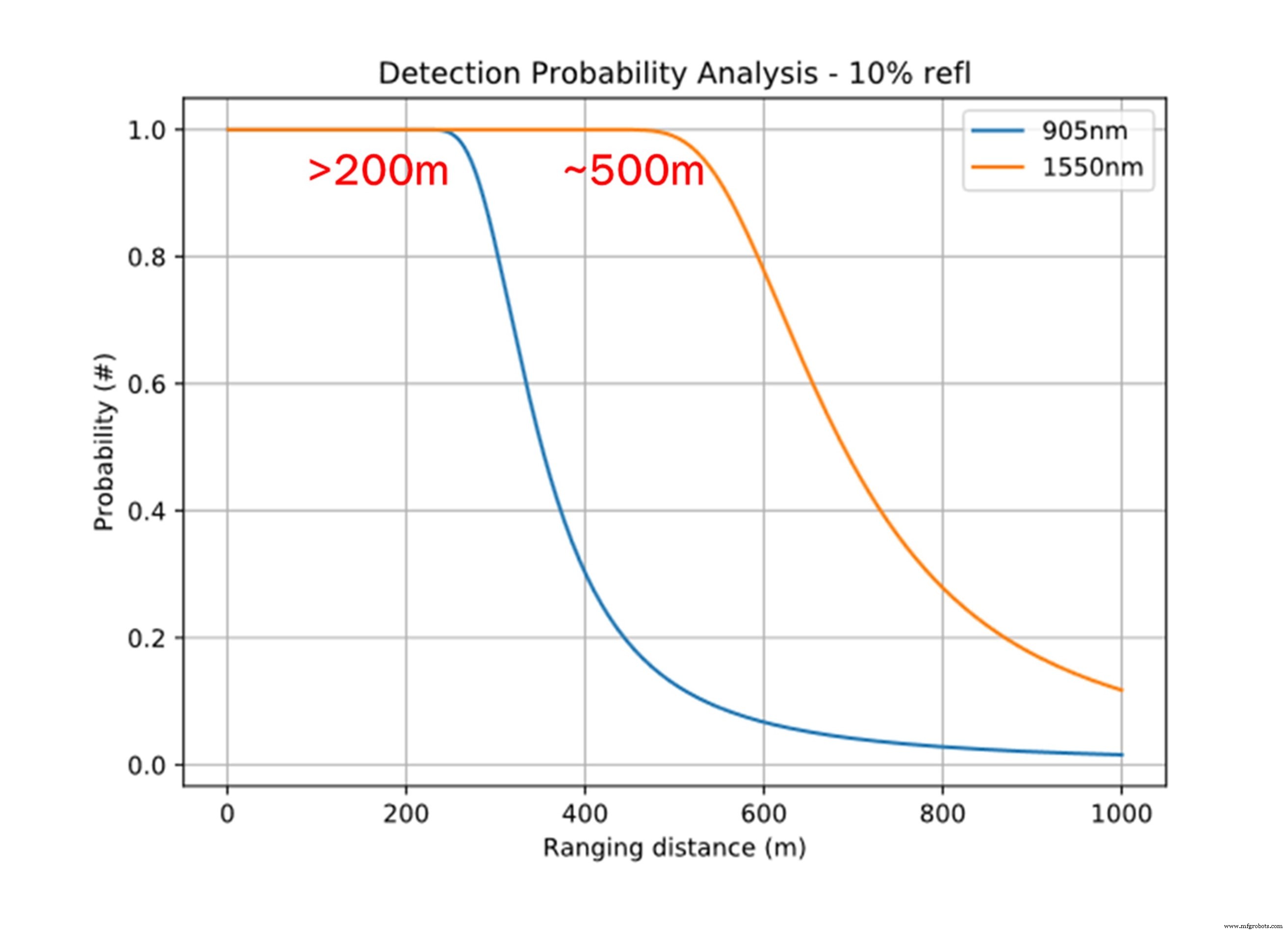
Figure 10: Range probability vs. wavelength.
Cost Analysis
According to IHS Markit (Amsrud, 2019), SWIR components can cost 10–100× more than their NIR counterparts. Estimated per‑channel costs for 2025 are $2–10 for NIR and $155 for SWIR. Given that LiDAR arrays contain dozens of channels, the cost differential becomes decisive, especially for cost‑conscious OEMs and industrial users.
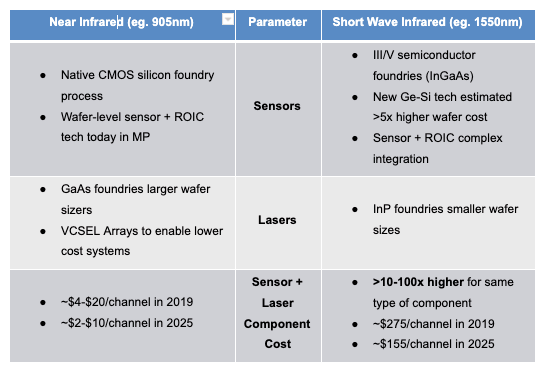
Table 3: Component cost comparison for NIR vs. SWIR LiDAR.
Conclusion
While SWIR LiDAR offers theoretical advantages in range and eye safety, the current ecosystem—dominated by mature silicon photonics, lower laser costs, and established supply chains—renders NIR the practical choice for automotive applications today. NIR LiDAR already satisfies long‑range performance targets and is far more cost‑efficient, ensuring its continued dominance until SWIR technology matures and scales. Consolidation is likely in the coming decade, mirroring historical shifts in automotive sensor markets.
References
- Yole Développement (2020). LiDAR for Automotive and Industrial Applications – Market and Technology Report 2020.
- Amsrud, P. (2019). The race to a low‑cost LIDAR system. Automotive LIDAR 2019, Detroit, MI. IHS Markit.
- Hadji, B. (2023). Director of Business Development, Automotive Sensing, ON Semiconductor.
Original article published on EE Times.
Related Content
- ADAS experts ponder sensor integration in future vehicles
- Smart cities: the case for lidar in intelligent transport systems
- What’s driving change in automotive electronics systems
- Time‑of‑flight technology promises enhanced accuracy
- Why FIR sensing technology is essential for achieving fully autonomous vehicles
For more embedded technology insights, subscribe to Embedded’s weekly newsletter.
Sensor
- How Industrial IoT Sensors Drive Modern Factory Efficiency
- Why LIDAR is Transforming Smart City Traffic Management
- DIY Accurate Oximeter Sensor Build – IR, Arduino, LCD & Component Guide
- LiDAR Advances: Revolutionizing Factory Automation
- Digital Sensors in Industrial Machinery: Function, Types, and Best Practices
- ToF vs. FMCW LiDAR: A Technical Breakdown for Informed Decisions
- Automatic Fire Suppression Systems: Safeguarding High-Risk Industries and Employees
- Mastering Hall Effect Sensors: Principles, Applications, and Design
- Camshaft Position Sensor Explained: How It Keeps Your Engine Running Smoothly
- Crankshaft Position Sensor Explained: Powering Precise Engine Timing