In landfills, floating on oceans, or rivers and on sidewalks. It was approximated that 46, 000 pieces of plastic trash are floating on the ocean per square mile. This plastic is killing animals, leaking chemicals and disrupting ecosystems. Each bottle can take up to one thousand years to decompose, leaking dangerous and harmful chemicals during the process. Some toxins leaked could cause cancer and reproductive disabilities. Burning of plastic generates toxic emissions such as carbon monoxide, chlorine, hydrochloride acid, fur-ans, and nitrites. Unfortunately, the argument of recycling can only do so little for its case since only 12% out of the thirty-five billion bottles use din one year gets recycled, indicating that only half of what you place in a recycle bin actually gets recycled.
IDEA:
A smart machine for plastic and metal waste disposal is a system which accepts Plastic wastes (bottles) and metal cans for recycling and in return dispenses pints in the wallet to the operator who recycles the waste. The reverse vending machine is equipped with proximity sensor to distinguish between different kinds of bottles and the points are gained when the user enter the code in the website.This invention relates in general to waste management and recycling the plastic and metal waste (bottles) in the environment. The littering of plastic wastes in the environment and less willingness to recycle the plastic presents a continuing problem to environment and to all the living beings.
WORKING:
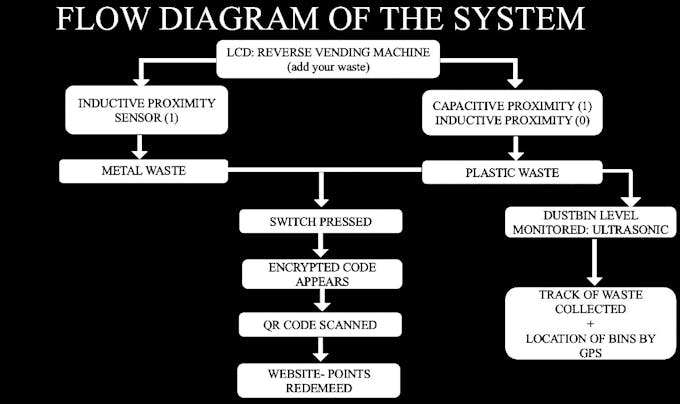
A Reverse Vending Machine is a device that accepts used beverage containers and returns money to the user (the reverse of the typical vending cycle). The machines are popular in places that have mandatory recycling laws or container deposit legislation.
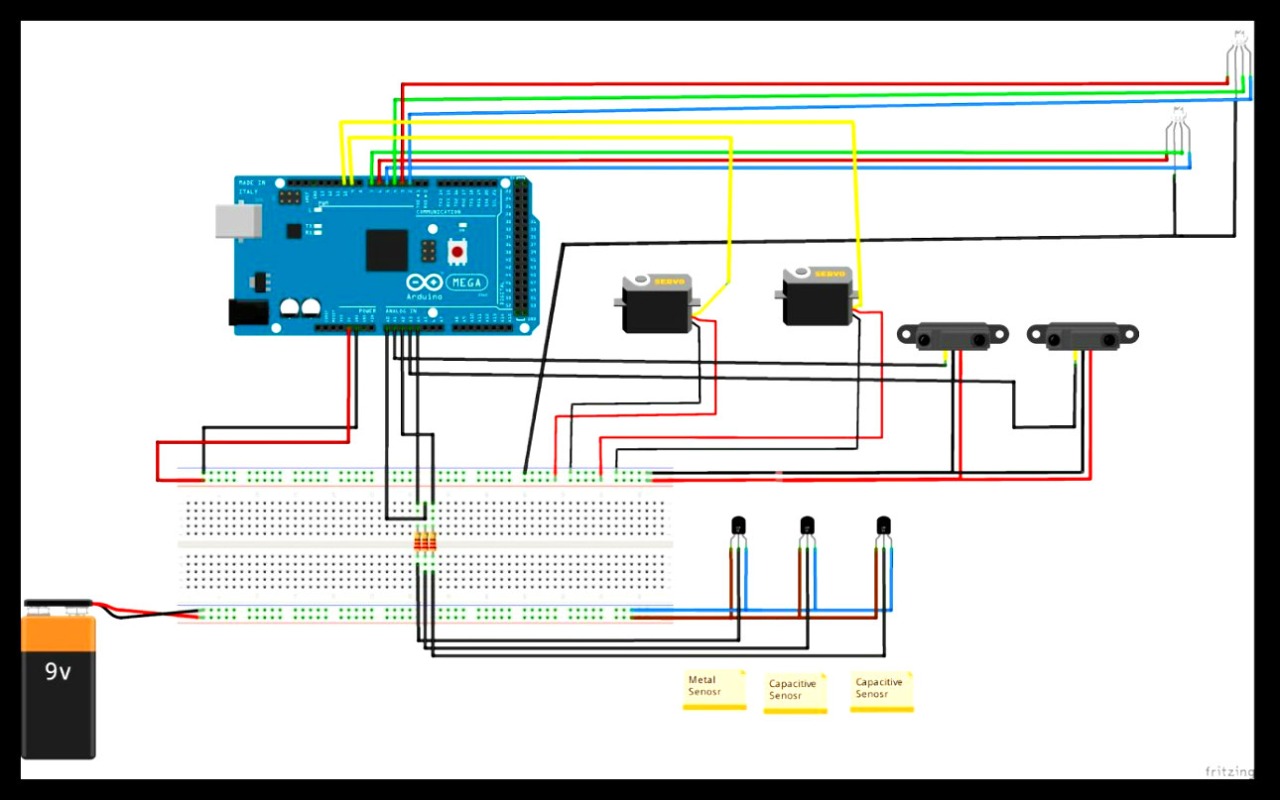
The basic operations involve steps where the recycler places the empty bottle/can into the receiving aperture; the horizontal in-feed system allows the user to insert containers one at a time. The bottle/can is then automatically scanned with the help of capacitive and inductive proximity sensors. If the sensor value of inductive sensor is 1 then the object is plastic and if the sensor value of inductive sensor is 0and capacitive sensor value is 1 then the object is plastic.
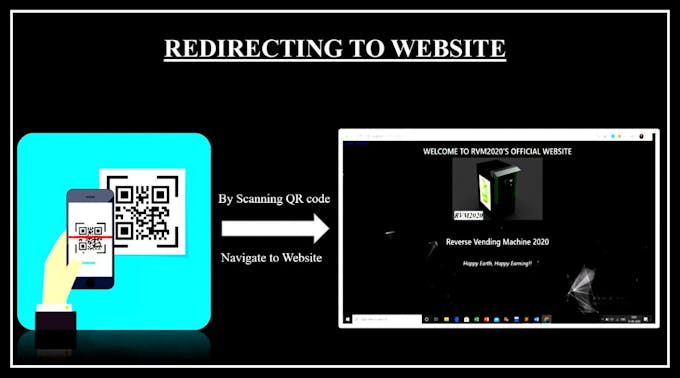
As for the reward system, RVM distributes valuable tokens, like coins or coupons, when beverage containers are recycled. The coupons are then used to redeem gifts at the counter. However, the awareness of environmental issues and the aim of reducing paper usage, the printing of coupons is not highly favored. So, in our proposed system as the plastic is detected an encrypted code appears on LCD screen. Then the user has to scan the OR code present on the machine to navigate to the website to redeem his points by entering the code he got on the LCD screen.
There is a database for the user who has an account in the website of reverse plastic vending machine. It is compulsory to have a account to login in the website to redeem the points for disposing plastic.
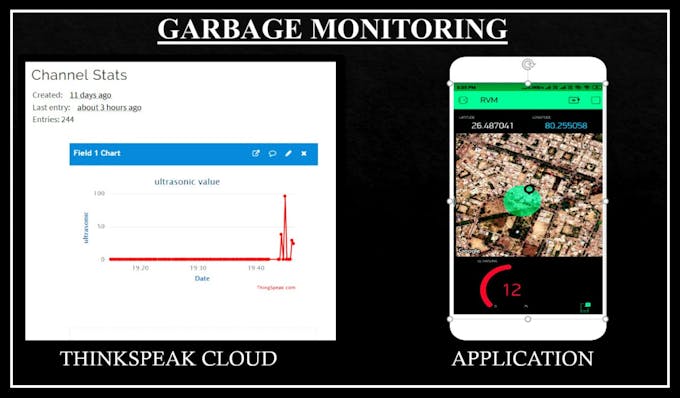
The machine has one more feature, if the machine is full then the garbage collectors or recycle vendors and notified with the help of an application. The level of machine is monitored using ultrasonic sensor and NodeMCU as the machine is full the collectors are informed and the exact location of machine is sent by the help of global positioning system.
Code
Waste Segregation
Dustbin level monitoring
Waste SegregationC/C++
#include <LiquidCrystal.h>
//#include "Arduino.h"
//#include "Button.h"
#include <Servo.h>
LiquidCrystal lcd(1,2,4,5,6,7);
const int knapp = 3;
int ButtonState = 0; // current state of the button
int oldButtonState = 0;
const int ledPin1 = 10;
const int ledPin2 = 11;
const int buzz1 = 12;
const int buzz2 = 13;
const int plasticsensor=A0;
int metalsensor= A1;
int metalsensor_M= A2;
Servo myservo;
Servo myservo_M;
int pos = 90;
int pos_M = 360;
void setup() {
pinMode(knapp, INPUT);
digitalWrite(knapp, LOW);
lcd.begin(16,2);
lcd.clear();
myservo.attach(9);
myservo_M.attach(8);
pinMode(plasticsensor,INPUT_PULLUP);
pinMode(metalsensor,INPUT_PULLUP);
pinMode(metalsensor_M,INPUT_PULLUP);
pinMode(ledPin1, OUTPUT);
pinMode(ledPin2, OUTPUT);
pinMode(buzz1, OUTPUT);
pinMode(buzz2, OUTPUT);
Serial.begin(9600);
}
void loop() {
lcd.setCursor(0,0);
lcd.print("INSERT METAL ON");
lcd.setCursor(0,1);
lcd.print(" RIGHT SIDE ");
delay(6000);
lcd.clear();
int sensor_read=digitalRead(plasticsensor);
Serial.println("plastic sensor");
Serial.println(sensor_read);
//delay (10);
int sensor_read_m=digitalRead(metalsensor);
//Plastic bin
Serial.println("metal sensor1");
Serial.println(sensor_read_m);
//delay (10);
int sensor_read_mm=digitalRead(metalsensor_M);
Serial.println(sensor_read_mm);
//delay (10);
if((sensor_read==1)&&(sensor_read_m!=1)){
for (pos = 90; pos <=240; pos += 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos);
// tell servo to go to position in variable 'pos'
//delay(5);
digitalWrite(ledPin1, HIGH);
digitalWrite(buzz1, HIGH);
// waits 15ms for the servo to reach the position
}
//delay(5000);
for (pos = 240; pos >=90; pos -= 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo.write(pos);
//delay(5);
}
}
else {
// goes from 180 degrees to 0 degr
myservo.write(pos);
digitalWrite(ledPin1, LOW);
digitalWrite(buzz1, LOW);
}
if((sensor_read_mm==1)&&(sensor_read==0)){
for (pos_M =360; pos_M >= 50; pos_M -= 1) { // goes from 0 degrees to 180 degrees
// in steps of 1 degree
myservo_M.write(pos_M);
//delay(5);
digitalWrite(ledPin2, HIGH);
digitalWrite(buzz2, HIGH);
}
// tell servo to go to position in variable 'pos'
// delay(5000);
for (pos_M = 50; pos_M <=360; pos_M += 1) { // goes from 180 degrees to 0 degrees
myservo_M.write(pos_M); // tell servo to go to position in variable 'pos'
//delay(5);// waits 15ms for the servo to reach the position
}
}
else{ myservo_M.write(pos_M);
digitalWrite(ledPin2, LOW);
digitalWrite(buzz2, LOW);
}
}
Dustbin level monitoringC/C++
#include "ThingSpeak.h"
#include <ESP8266WiFi.h>
#include <BlynkSimpleEsp8266.h>
#include <TinyGPS++.h>
#include <SoftwareSerial.h>
#define BLYNK_PRINT Serial
#define TRIGGER2 5
#define ECHO2 4
WiFiClient client;
static const int RXPin = 4, TXPin = 5; // GPIO 4=D2(conneect Tx of GPS) and GPIO 5=D1(Connect Rx of GPS
static const uint32_t GPSBaud = 9600;
//if Baud rate 9600 didn't work in your case then use 4800
unsigned long myChannelField = 1067056; // Channel ID
const int ChannelField = 1; // Which channel to write data
const char * myWriteAPIKey = "FMV95MD2A1J7Y8SP"; // Your write A
TinyGPSPlus gps; // The TinyGPS++ object
WidgetMap myMap(V0); // V0 for virtual pin of Map Widget
SoftwareSerial ss(RXPin, TXPin); // The serial connection to the GPS device
BlynkTimer timer;
// You should get Auth Token in the Blynk App.
char auth[] = "YVvgHBx9fIM1-yR_2XrGXXkKdIuEmrYL";
// Your WiFi credentials.
// Set password to "" for open networks.
char ssid[] = "diksha";
char pass[] = "diksha19";
unsigned int move_index = 1;
void setup() {
Serial.begin (115200);
ss.begin(GPSBaud);
Blynk.begin(auth, ssid, pass);
// timer.setInterval(5000L, checkGPS);
pinMode(TRIGGER2, OUTPUT);
pinMode(ECHO2, INPUT);
pinMode(BUILTIN_LED, OUTPUT);
WiFi.mode(WIFI_STA);
ThingSpeak.begin(client);
}
/*void checkGPS(){
if (gps.charsProcessed() < 10)
{
Serial.println(F("No GPS detected: check wiring."));
}
}*/
void loop() {
if (WiFi.status() != WL_CONNECTED)
{
Serial.print("Attempting to connect to SSID: ");
Serial.println(ssid);
while (WiFi.status() != WL_CONNECTED)
{
WiFi.begin(ssid, pass);
Serial.print(".");
delay(100);
}
Serial.println("\nConnected.");
}
while (ss.available() > 0)
{
// sketch displays information every time a new sentence is correctly encoded.
if (gps.encode(ss.read()))
Serial.println("GPS Connected");//displayInfo();
{
if (gps.location.isValid() )
{
float latitude = (gps.location.lat()); //Storing the Lat. and Lon.
float longitude = (gps.location.lng());
Serial.print("LAT: ");
Serial.println(latitude, 6); // float to x decimal places
Serial.print("LONG: ");
Serial.println(longitude, 6);
ThingSpeak.setField(3, latitude);
ThingSpeak.setField(4, longitude);
ThingSpeak.writeFields(myChannelField, myWriteAPIKey);
Blynk.virtualWrite(V1, String(latitude, 6));
Blynk.virtualWrite(V2, String(longitude, 6));
myMap.location(move_index, latitude, longitude, "GPS_Location");
}
}
}
//long duration1, distance1;
long duration2, distance2;
digitalWrite(TRIGGER2, LOW);
delayMicroseconds(2);
digitalWrite(TRIGGER2, HIGH);
delayMicroseconds(10);
digitalWrite(TRIGGER2, LOW);
duration2 = pulseIn(ECHO2, HIGH);
distance2 = (duration2/2) / 29.1;
if (distance2 <= 5) {
Blynk.notify("Please!! empty the dustbin");
}
Serial.println("2 ultrasonic Centimeter:");
Serial.println(distance2);
Blynk.virtualWrite(V6, distance2);
ThingSpeak.writeField(myChannelField, ChannelField, distance2, myWriteAPIKey);
delay(100);
Blynk.run();
timer.run();
}