


Designing High‑Performance Drone ESCs: Essential Design Factors and Market Solutions
In drone engineering, precise control of motor speed and direction is paramount. Brushless DC motors dominate the market due to their compact size, low cost, and robust performance. An electronic speed controller (ESC) is the hub that manages power delivery, current sensing, microcontroller logic, and communication with the flight system, making it indispensable to modern UAVs.
Core Considerations for ESC Design
When architecting an ESC, engineers must weigh the following critical parameters:
- Battery type and voltage rating installed on the drone
- Motor specifications and power class
- Budget constraints for components and manufacturing
- Electromagnetic compatibility (EMC) and interference resilience
Most quadcopters employ either brushless DC (BLDC) or permanent‑magnet synchronous (PMSM/BLAC) motors. The choice dictates the control algorithm: trapezoidal or field‑oriented control (FOC). Trapezoidal control uses a six‑phase switching sequence and estimates rotor angle in sensorless setups via back‑EMF. FOC, meanwhile, delivers sinusoidal phase currents, achieving 1°‑5° angle accuracy and maximizing torque under rapid acceleration.
Field‑Oriented Control Architecture
FOC is the industry standard for drone ESCs, enabling smooth torque generation and efficient power use. A typical FOC block diagram includes:
- Dual‑PI current controllers
- Optional speed‑loop and reference current generator
- Clarke, Park, and inverse Park transforms for reference frame conversion
- Space‑vector modulator (SVM) to generate PWM waveforms
- Startup/shutdown logic and protection circuits
- Optional observer for sensorless rotor position estimation
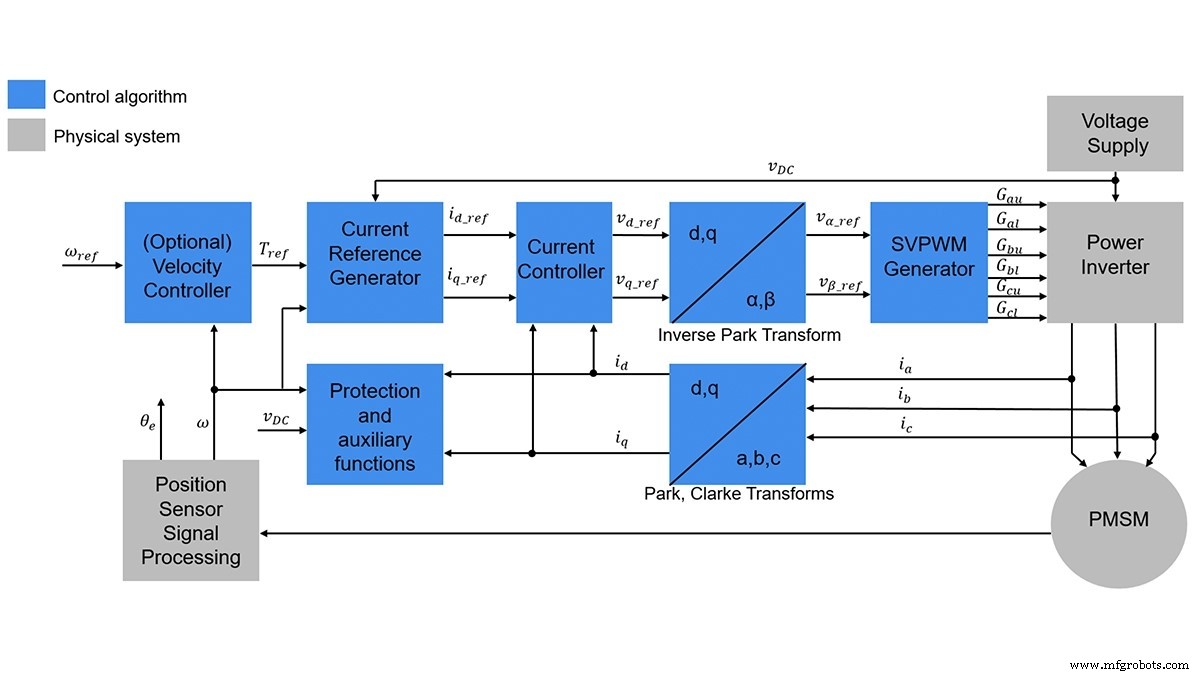
Figure 1. Field‑Oriented Control Block Diagram (Source: MathWorks)
Choosing between open‑loop and closed‑loop (sensorless) control hinges on the application’s precision needs. Closed‑loop systems continually monitor current and voltage to correct deviations, ensuring consistent performance even under load changes.
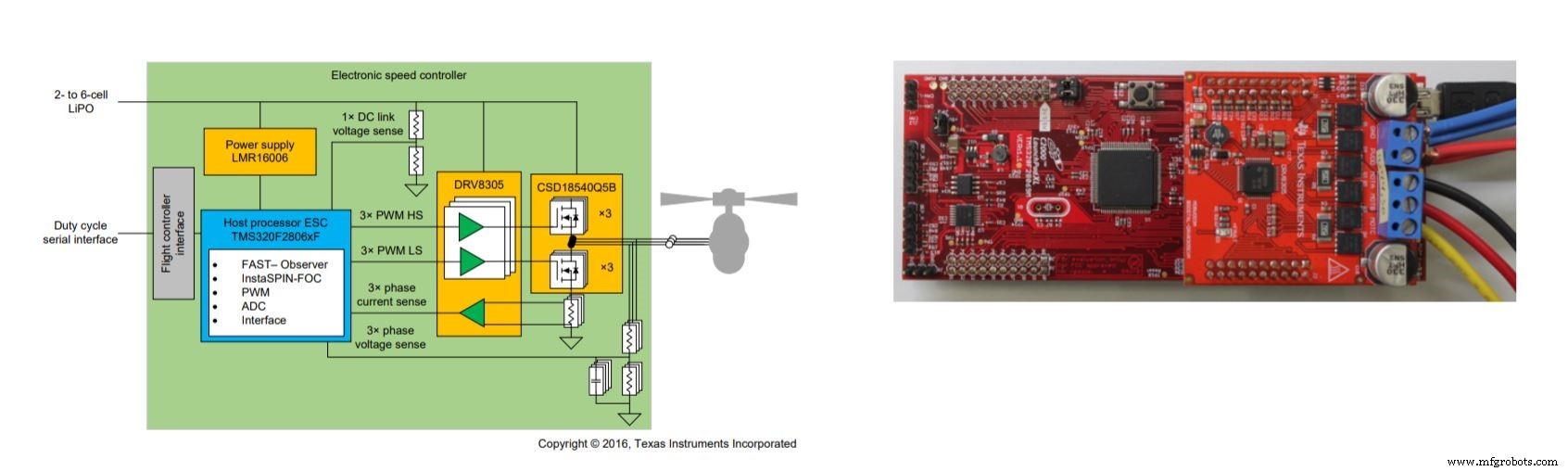
Figure 2. Sensorless ESC Design (Source: Texas Instruments)
Quadcopter Dynamics and Motor Coordination
In a typical quadcopter, two motors spin clockwise while the opposite pair spins counter‑clockwise. Equal thrust on all four motors results in level flight; differential thrust produces roll, pitch, yaw, and altitude changes. Flight controllers use PID loops to adjust motor speeds in real time, ensuring stability during complex maneuvers.
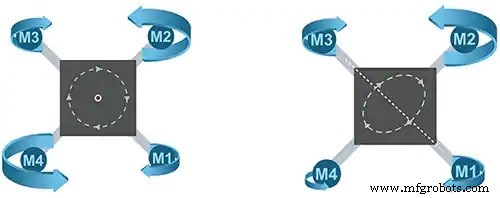
Figure 3. Rotor Speed Combinations for Drone Maneuvers (Source: STMicroelectronics)
Reference Designs and Commercial Solutions
Leading semiconductor vendors offer turnkey ESC solutions that reduce design cycle time and guarantee reliability:
- Texas Instruments – The InstaSPIN‑FOC and InstaSPIN‑MOTION families deliver 32‑bit MCU‑based control for sensorless FOC, supporting motors above 12,000 RPM and peak currents >30 A.
- STMicroelectronics – The STEVAL‑ESC001V1 reference board drives any three‑phase BLDC/PMSM motor up to 30 A peak from a 6S Li‑Po pack. Pre‑configured firmware (STSW‑ESC001V1) and an STM32 FOC SDK streamline development.
- NXP – The RDDRONE‑FMUK66 flight kit combines an STM32 microprocessor, Linux, Open CV, GPS, and 40 A ESCs, offering an open‑source platform for autonomous drones and UAVs.
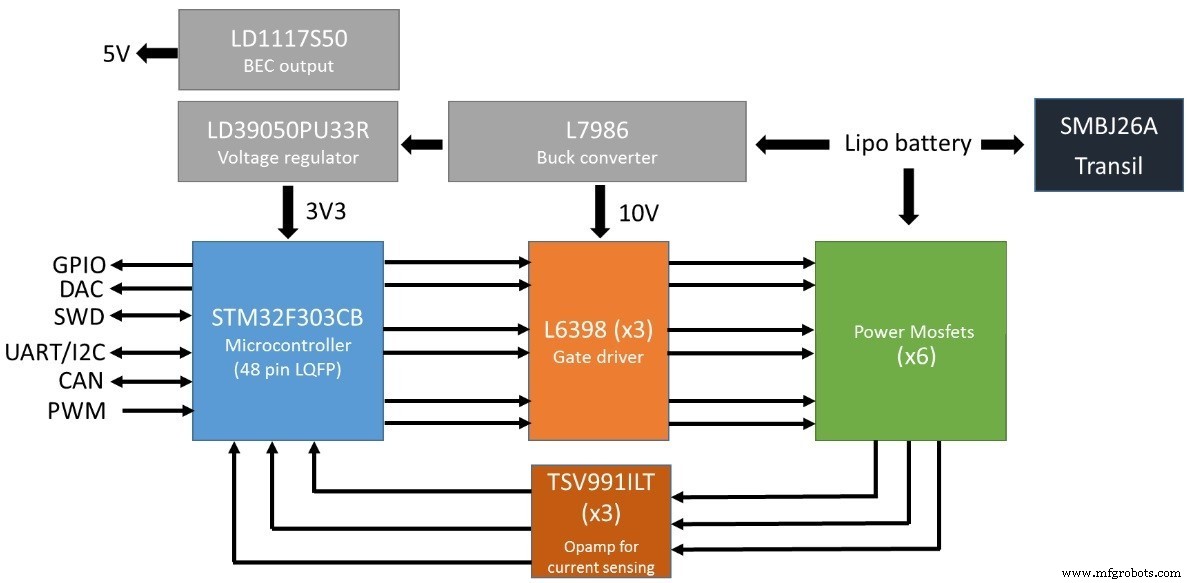
Figure 4. ST’s STEVAL‑ESC001V1 Solution (Source: STMicroelectronics)
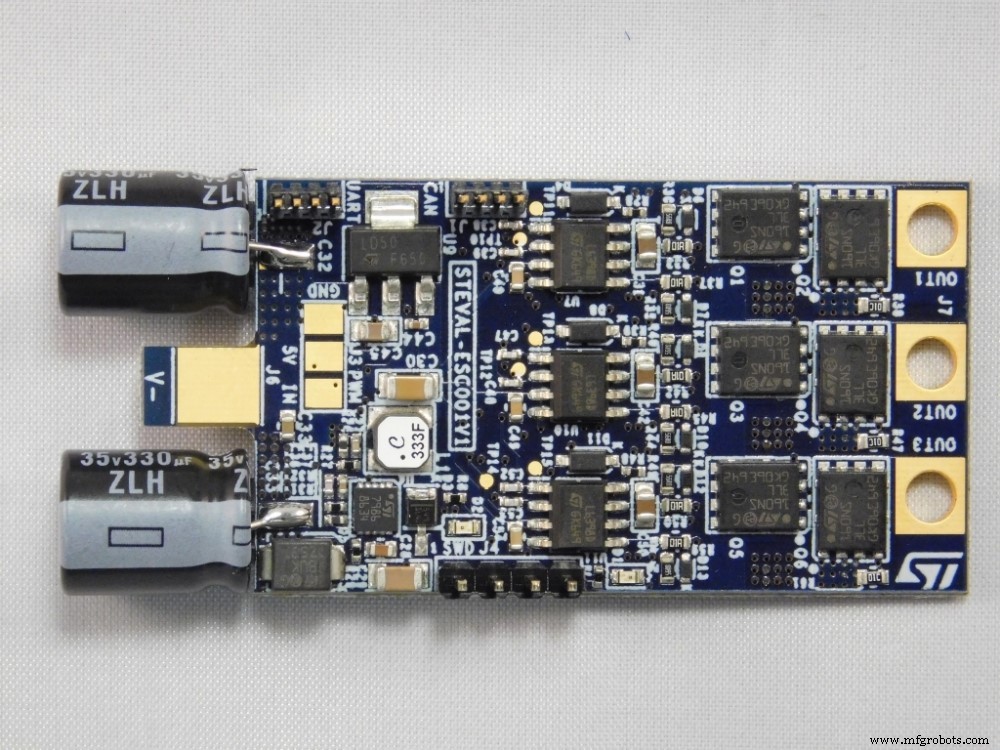
Figure 5. STEVAL‑ESC001V1 Board (Source: STMicroelectronics)
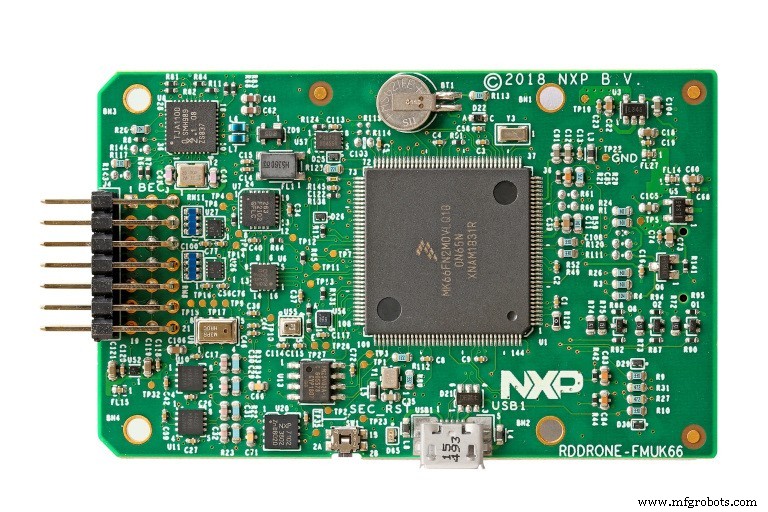
Figure 6. RDDRONE‑FMUK66 Flight Unit (Source: NXP)
NOTE: This article was originally published on Power Electronics News.
Related Topics:
- Designing electronic speed controllers for drones
- Drones keep moving on wireless charging solutions
- LiDAR sensor supports high‑resolution imaging in UAVs
- Dev kits offer platforms for digital‑power, motor‑control designs
- Designing motor controls for robotic systems
- Sensor fusion brings multiple benefits
Subscribe to Embedded’s weekly newsletter for more embedded‑system insights.
Embedded
- Advanced Motor Control Circuits: Latching, Stop, and Time‑Delay Techniques
- Engineering Precise Motor Controls for Advanced Robotic Systems
- Infineon Unveils IMC300 Motor Controller with Integrated Arm Cortex‑M0 for Enhanced Flexibility
- Trinamic & Maxim Integrated Release Reference Design to Speed End‑of‑Arm Tooling Development in Industrial Robotics
- Field‑Oriented Control: The Key to Smooth, Efficient EV Motor Performance
- How Wide‑Bandgap Semiconductors Revolutionize Motor Control Design
- Brain‑Controlled Drone: Using EEG to Fly a Micro Racing Drone
- Mastering KPI Success: 3 Essential Elements for Peak Performance
- Advanced DC Motor Speed Control: Voltage, Rheostatic, and Flux Techniques
- Control Hydraulic Motor Speed with PWM & Remote Control: A Practical Guide