


Field‑Oriented Control: The Key to Smooth, Efficient EV Motor Performance
High‑performance electric‑vehicle (EV) motors demand a control strategy that guarantees smoothness, reliability, and efficiency. Field‑Oriented Control (FOC) is the industry‑standard solution, enabling precise torque and flux regulation across a wide speed range.
For an EV to accelerate and coast seamlessly, the controller must manage torque and magnetic flux so that the motor delivers maximum torque at low speeds while maintaining optimal efficiency. This requires accurate current control driven by precise rotor‑position knowledge.
In a rotating machine, the stator creates a magnetic field by energizing its windings with alternating current. The secret to smooth operation lies in knowing the rotor’s angle relative to the stator’s magnetic axis. Once this angle is known, the stator current can be aligned with the rotor’s torque axis, ensuring that the stator flux remains perpendicular to the rotor flux for peak efficiency.
FOC‑Based Motor Control
On paper, a typical FOC system looks like Figure 1, combining hardware and software components that work in concert to drive a permanent‑magnet synchronous motor (PMSM) or brushless DC (BLDC) motor.
click for full size image
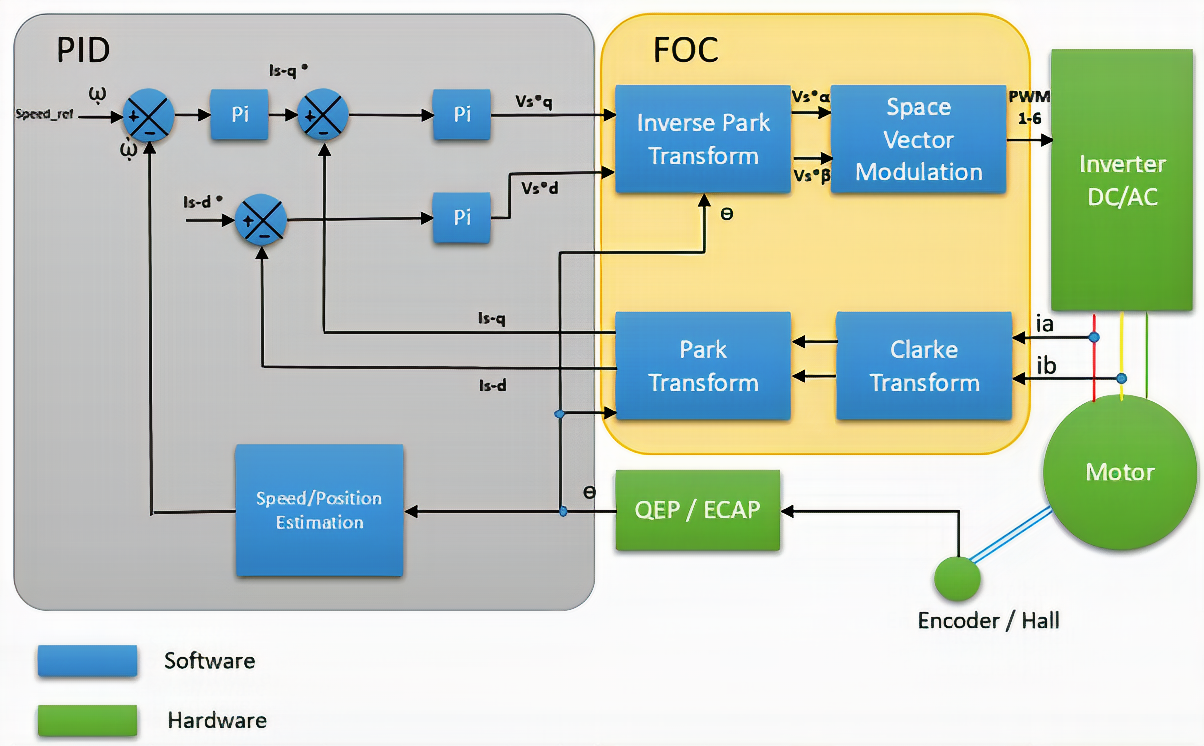
Figure 1: Hardware and software components of an FOC‑based motor control system. Source: Texas Instruments
Let’s break down the key components:
- Three‑phase inverter: Converts DC to three‑phase AC voltage for the motor, driven by pulse‑width modulation (PWM) signals from the Space Vector Modulation (SVM) block.
- QEP interface: Reads rotor position from an encoder and supplies it to downstream blocks.
- Speed/position estimation: Calculates rotor speed and position, refining the raw encoder data.
- PID controller: Uses torque feedback to adjust the motor’s electrical torque, closing the control loop.
- Clarke transform: Converts three‑phase stator currents (Ia, Ib) into a two‑axis stationary reference frame (iα, iβ).
- Park transform & inverse Park transform: Maps between stationary (α‑β) and rotating (d‑q) reference frames, isolating torque‑producing (Id) and flux‑producing (Iq) components.
- Space Vector Modulation: Generates the PWM signals that drive the inverter, translating the desired stator voltage vector into discrete transistor states.
Below is a concise overview of the FOC workflow, illustrating how these blocks interact in real time.
FOC Workflow
To control a three‑phase motor, the controller must supply the correct voltage vector. This is achieved by measuring phase currents (Ia, Ib, Ic). Without current regulation, the stator flux vector cannot be positioned 90° to the rotor flux vector.
FOC transforms the sinusoidal phase currents into d‑q components, which can be controlled independently. The process begins with the encoder (or Hall sensor) feeding rotor position to the Park transform. Meanwhile, the Clarke transform converts Ia and Ib into iα and iβ, which the Park transform then converts into DC Id and Iq. The PID controller compares the desired torque (derived from the driver’s throttle input) with the actual torque, producing voltage commands Vd and Vq. These voltages pass through the inverse Park and inverse Clarke transforms to return to the α‑β stationary frame, where SVM creates the PWM signals for the inverter.
click for full size image
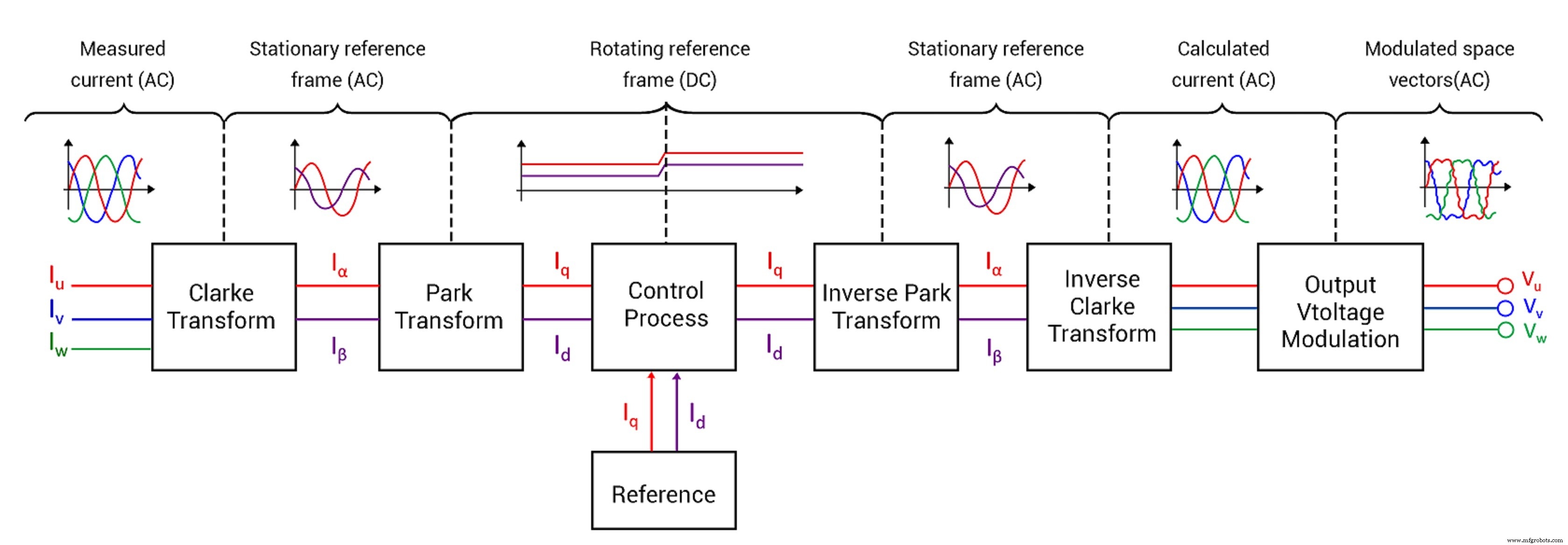
Figure 2: Flow of signals from PID through inverse transforms to SVM. Source: Texas Instruments
In the final step, SVM calculates the mean voltage vector that corresponds to the desired stator voltage. It does this by selecting among eight discrete switching states (2³), which map onto a hexagonal star diagram. Each adjacent vector is 60° apart, allowing precise voltage synthesis.
FOC in Real‑World EVs
FOC is indispensable for modern EVs that demand smooth, quiet operation and high efficiency. OEMs often tailor the base algorithm—adjusting estimator parameters, adding sensorless techniques, or integrating advanced torque‑controller tuning—to meet specific performance targets. Recent automotive‑grade microcontrollers, such as Microchip’s PIC18Fxx39 series or TI’s C2000 family, provide the computational power and integrated peripherals needed to implement robust FOC in cost‑effective ways.
>> This article was originally published on our sister site, EDN.
 Vaibhav Anand is a digital marketing executive at Embitel.
Vaibhav Anand is a digital marketing executive at Embitel.
 Saurabh S. Khobe is an embedded engineer at Embitel.
Saurabh S. Khobe is an embedded engineer at Embitel.
Related Contents:
- Solving deterministic multi‑axis motor control design challenges
- Safely controlling an EV traction inverter
- Emerging solutions enhance electric‑vehicle power management
- Identifying requirements for E/E development
- Motor controller integrates Arm Cortex‑M0 core
For more Embedded, subscribe to Embedded’s weekly email newsletter.
Embedded
- Advanced Motor Control Circuits: Latching, Stop, and Time‑Delay Techniques
- Infineon Unveils IMC300 Motor Controller with Integrated Arm Cortex‑M0 for Enhanced Flexibility
- How Wide‑Bandgap Semiconductors Revolutionize Motor Control Design
- Build a Smart Piggy Bank: Control a Coin Acceptor with Arduino Nano
- Control an LED via Bluetooth with Arduino – Simple DIY Guide
- Precise Stepper Motor Control: 28BYJ-48 with Arduino UNO & Joystick
- Display Numbers on a 7‑Segment Display Using a Keypad – Step‑by‑Step Guide
- Master Stepper Motor Control with Arduino & A4988 Driver – Step-by-Step Guide
- Millport SmartLathez 1740 CNC Lathe – Precision & Power
- Enhance Wood Finishing Precision with ABB Integrated Force Control