


Build an Automated LEGO Star Wars Shooter with Arduino Uno
Components and supplies
 |
| × | 1 | |||
 |
| × | 4 | |||
 |
| × | 1 | |||
| × | 4 | ||||
 |
| × | 1 |
Necessary tools and machines
|
|
Apps and online services
 |
|
About this project
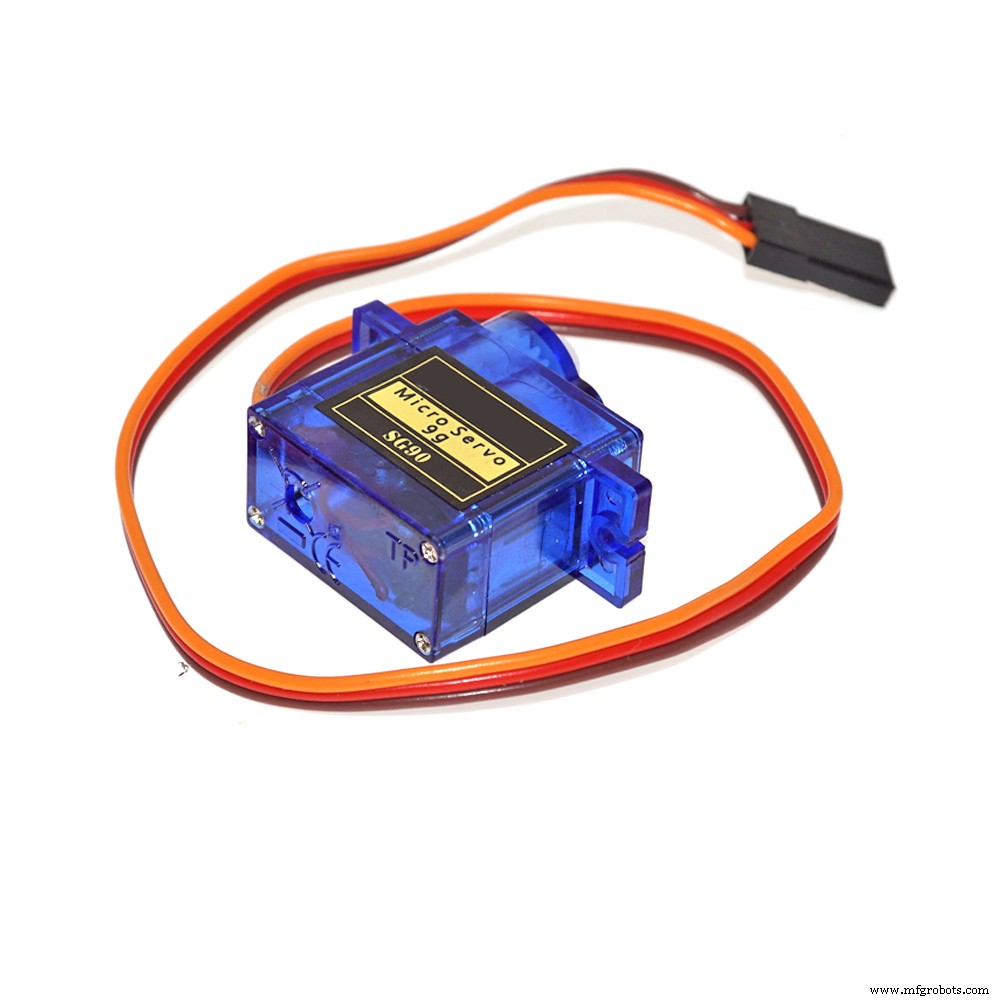
This project is about getting Lego Cannons to shoot automatically. I like playing with legos, and I like using Arduinos, so I decided to do this project in my free time. The Servo motors, with their horns attached, spin around hitting the lever and shooting the cannon. A great first, second, or third project for beginners!
This is a step by step guide on how to make it.
Step 1: The HardwareStep 1 Part 1: Hardware Basics
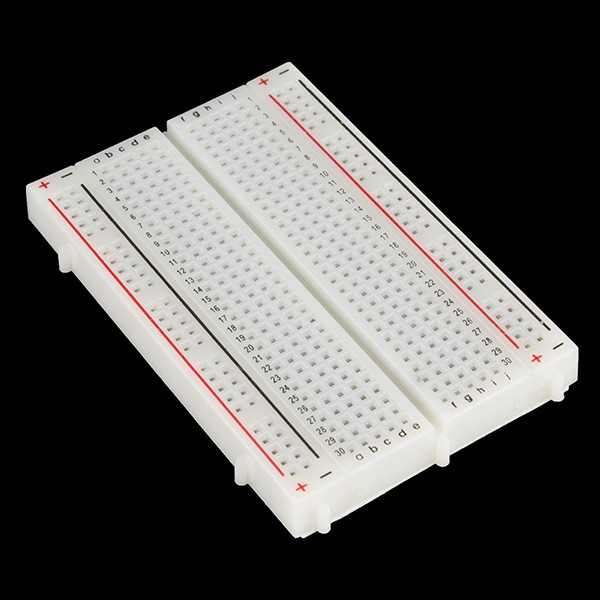
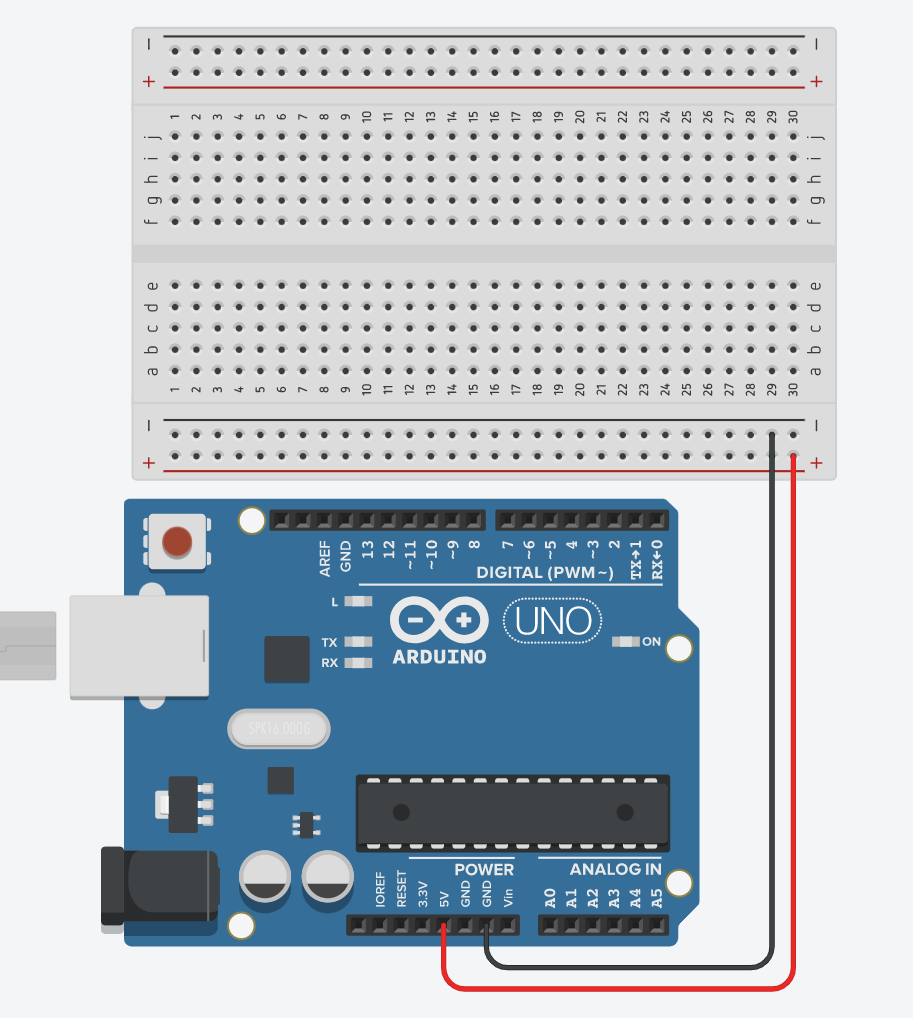
Start with 5V going to the positively charged row and GRND going to the negatively charged row. It'll look like this -
Step 1 Part 2: Hooking up Servo #1
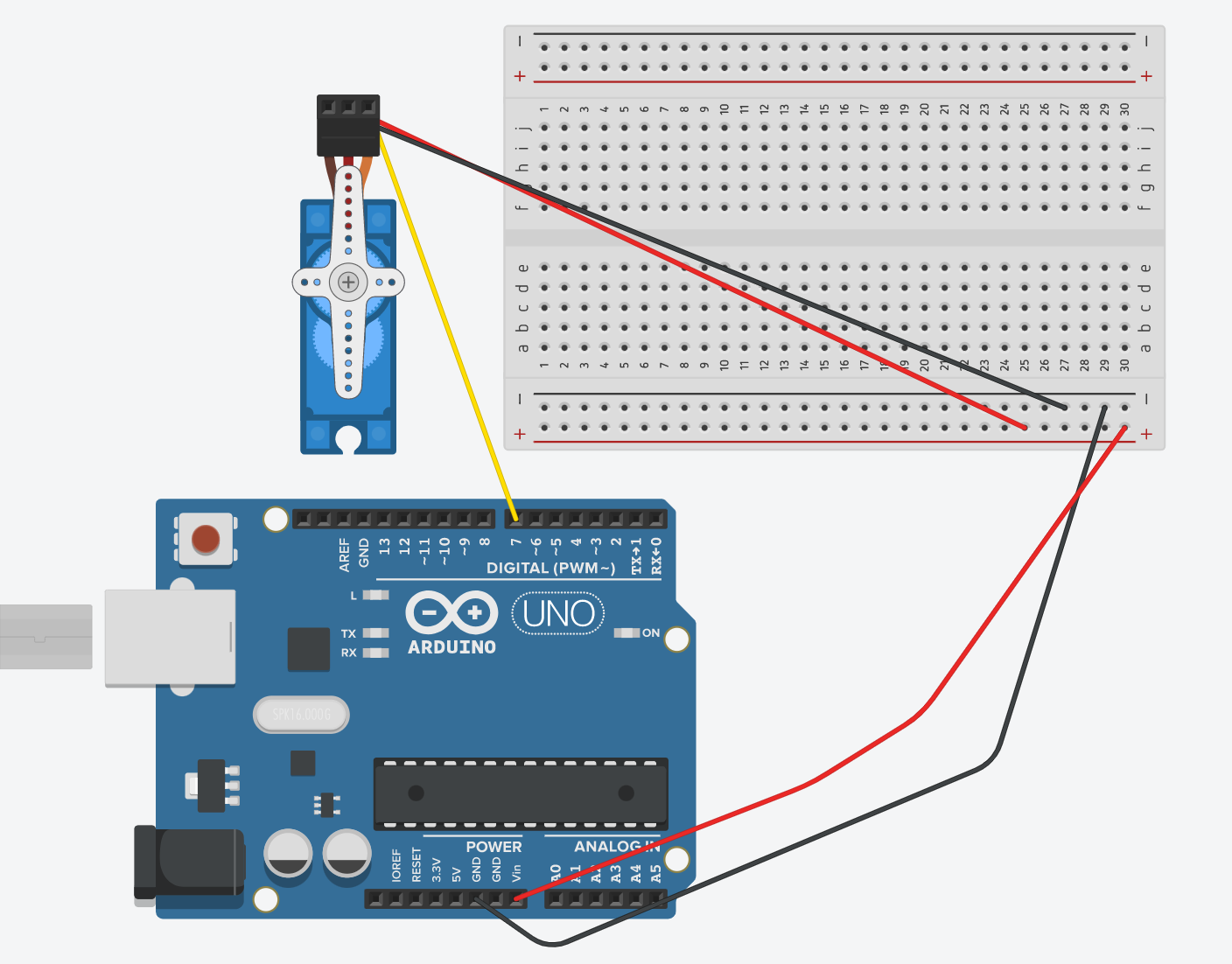
The Servo has three wires - the orange/yellow (signal) one will take up a slot in the DIGITAL (PWM~), the red one (Power) will go to VIN (which is any pin in the positive row), and the black/brown wire (GRND) will go to the negatively charged row connected to the GRND pin on the Uno. The Digital pin that I used for my first servo is 7. Here is how the schematic looks like when the first servo is hooked in -
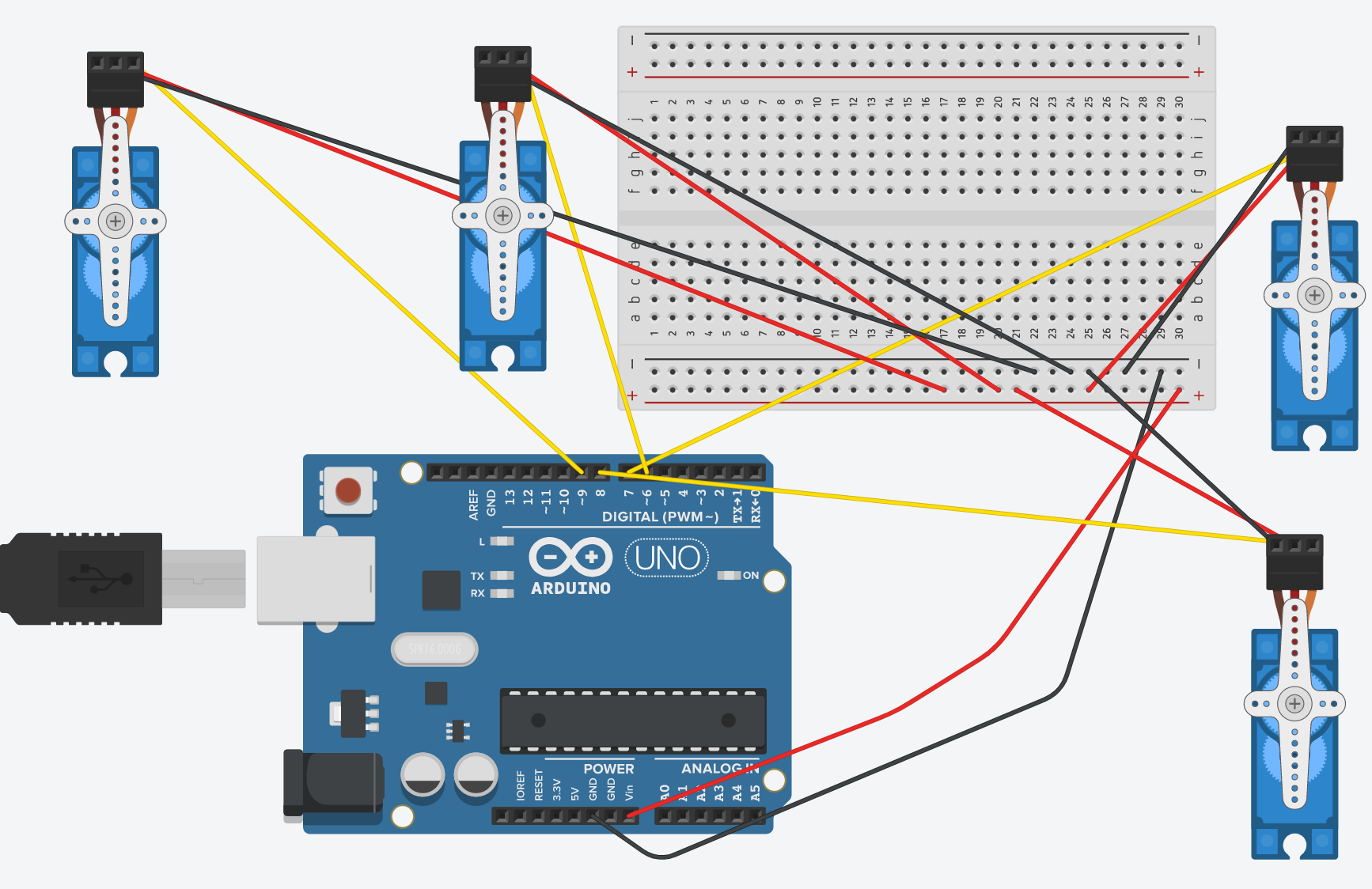
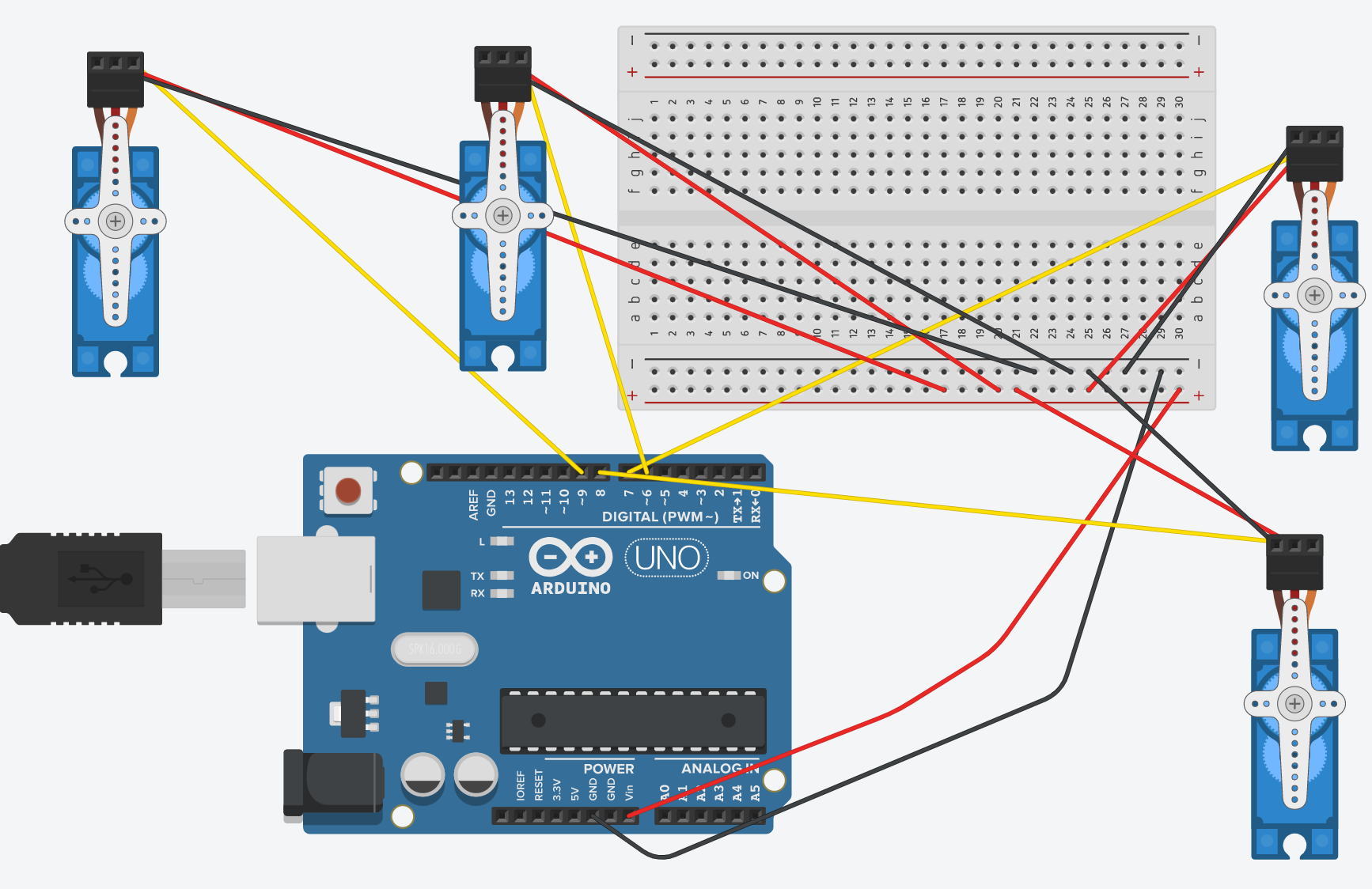
Step 1 Part 3: Wiring up the rest of the Servos
Once you get the hang of it with the servos, the rest should be a breeze. One thing to note, however - you have to keep consistent with the Digital Pins you attached with your servo in the code.
For example, the code (which can be found at the bottom of the page), states-
secondCannon.attach(8);
Therefore, the second Servo must be connected to the digital pin 8.
In the same way, the third Servo must be attached to the digital pin 6, and the fourth should be attached to the ninth digital pin.
However, these can be changed so that they are in any order you want them to be. Just make sure you are changing both hardware and software for consistency, otherwise, the code will not work.
To run with the code provided at the bottom, this is how the schematic should look like-
Congratulations! You have officially completed the hardware portion of this project.
Step 2: The SoftwareNow, copy and paste the code at the bottom of the page onto an Arduino sketch, and upload it. Make sure you have the Servo library before uploading the code, otherwise it will not work! Below is a step-by-step guide explaining the code and what it means when running the program.
#include <Servo.h> //Including the library for the Servos
Servo firstCannon; //Defining the First Cannon as a Servo
Servo secondCannon; //Defining the Second Cannon as a Servo
Servo thirdCannon; //Defining the Third Cannon as a Servo
Servo fourthCannon; //Defining the Fourth Cannon as a Servo
This code sets up the Servo.h library, which will play a fundamental role in the code. This can be shown by the following lines, using the library to define four cannons as Servos, or motors that can be rotated 180 degrees.
void setup() { //Setup code, or code that is only run once
Serial.begin(9600); //Start the Serial communication
Serial.println("Defend the Clones! Set up the defenses!") //Prints something in the Serial Monitor
firstCannon.attach(7); //Attach Digital Pin 7 to First Cannon
secondCannon.attach(8); //Attach Digital Pin 8 to Second Cannon
thirdCannon.attach(6); //Attach Digital Pin 6 to Third Cannon
fourthCannon.attach(9); //Attach Digital Pin 9 to Fourth Cannon
}
The void setup() code is used within almost any Arduino project, and it is code that is only run once. In this case, we are starting the newline Serial Communication at 9600 baud. Then, we are printing things in the Serial Monitor. In order to program the Servos, we have to connect their names the their respective digital pins. This is the purpose of the .attach() piece of code.
void loop() { //Loop code, or code that is run an infinite amount of times
Serial.println("Beginning firing sequence") //Print something in the Serial Monitor
firstCannon.write(180); //Swerve the first servo 180 degrees, setting off the first cannon
delay(100); //Wait for 1/10 of a second
firstCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
secondCannon.write(180); //Swerve the second servo 180 degrees, setting off the second cannon
delay(100); //Wait for 1/10 of a second
secondCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
thirdCannon.write(180); //Swerve the third servo 180 degrees, setting off the third cannon
delay(100); //Wait for 1/10 of a second
thirdCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
fourthCannon.write(180); //Swerve the first fourth 180 degrees, setting off the fourth cannon
delay(100); //Wait for 1/10 of a second
fourthCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
Serial.println("All cannons fired");
Serial.println("Prepare for reload");
delay(10000);
Serial.println("Reloading Complete. Preparing to fire again")
}
This is the final piece of code, using the void loop() function that allows the following code to be run an infinite amount of times. Then, we print in the Serial Monitor that the cannons are about to fire. The Servos for each cannon should spin 180 degrees, then spin back to the original position, one at a time. After that, there should be 10 seconds (reloading time) until the process repeats itself again.
If you have any other issues when uploading the code, you can comment in the comments section and I will respond ASAP. If it works, then move on to the next step.
Step 3: InstallationThe last step requires the lego cannons and some old-fashioned regular tape. The lego cannon looks like this -

Run the code. See which way the servo turns. Tape the servo onto the lego cannon so that its trajectory sets it on a collision course with the lever on top of the cannon in the picture above.
Good job! You have officially finished this project. Like I said, comment in the section below if you have any questions.
If you liked this project, check out these links -
https://create.arduino.cc/projecthub/342600/basketball-hoop-with-buzzer-using-an-arduino-693bad?ref=user&ref_id=1536504&offset=1
https://create.arduino.cc/projecthub/ShreyanR/soundbox-826a56
Code
- Lego Gun Shooter Code
Lego Gun Shooter CodeC/C++
Paste this into Arduino IDE#include <Servo.h> //Including the library for the Servos
Servo firstCannon; //Defining the First Cannon as a Servo
Servo secondCannon; //Defining the Second Cannon as a Servo
Servo thirdCannon; //Defining the Third Cannon as a Servo
Servo fourthCannon; //Defining the Fourth Cannon as a Servo
void setup() { //Setup code, or code that is only run once
Serial.begin(9600); //Start the Serial communication
Serial.println("Defend the Clones! Set up the defenses!") //Print something in the Serial Monitor
firstCannon.attach(7); //Attach Digital Pin 7 to First Cannon
secondCannon.attach(8); //Attach Digital Pin 8 to Second Cannon
thirdCannon.attach(6); //Attach Digital Pin 6 to Third Cannon
fourthCannon.attach(9); //Attach Digital Pin 9 to Fourth Cannon
}
void loop() { //Loop code, or code that is run an infinite amount of times
Serial.println("Beginning firing sequence") //Print something in the Serial Monitor
firstCannon.write(180); //Swerve the first servo 180 degrees, setting off the first cannon
delay(100); //Wait for 1/10 of a second
firstCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
secondCannon.write(180); //Swerve the second servo 180 degrees, setting off the second cannon
delay(100); //Wait for 1/10 of a second
secondCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
thirdCannon.write(180); //Swerve the third servo 180 degrees, setting off the third cannon
delay(100); //Wait for 1/10 of a second
thirdCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
fourthCannon.write(180); //Swerve the first fourth 180 degrees, setting off the fourth cannon
delay(100); //Wait for 1/10 of a second
fourthCannon.write(0); //Swerve the Servo back to original position in preparation for reload
delay(1000); //Wait for 1 second
Serial.println("All cannons fired");
Serial.println("Prepare for reload");
delay(10000);
Serial.println("Reloading Complete. Preparing to fire again")
}
Schematics
Manufacturing process
- Versatile Duct Tape: Strength, Flexibility, and Everyday Uses
- Cellophane Tape: History, Production, and Environmental Impact
- Build a Giant Lego Minifigure Animatronic Operation Game with Arduino
- SunGlass‑BOT: Smart Sunglasses That Auto‑Adjust to Light
- Build an Arduino-Powered Automated Google Chrome Dino Game
- Arduino-Driven Automated Dehumidifier Sump Pump – DIY System
- Smart Arduino-Powered Automated Parking Garage System
- Build an Arduino‑Powered LEGO Arcade Game Box – DIY Kit with Nano, Battery, LCD, and More
- Smart Automated Garden System with Arduino UNO and Raspberry Pi
- Build a LEGO Wall‑E Robot with Arduino Nano: A Step‑by‑Step Guide