Code
hydraulic.inoArduino
// 1st and 2nd motor driver is for the ARM control
// 3rd motor driver is for the LOCOMOTIVE part
//1st Motor driver [BASE(2,3) AND SHOULDER(4,7)]
int m1IN1 =2; //in1
int m1IN2 =3; //in2
int m1IN3 =4; //in3
int m1IN4 =5; //in4
int m1ENA =6; // for speed control, speed control is not used here so kept it HIGH when in motion and make it LOW to stop the motor
int m1ENB =7; // for speed control, speed control is not used here so kept it HIGH when in motion and make it LOW to stop the motor
//2nd Motor driver [ELBOW(8,9) AND GRIPPER(12,13)]
int m2IN1 =8; //in1
int m2IN2 =9; //in2
int m2IN3 =10; //in3
int m2IN4 =11; //in4
int m2ENA =12; // for speed control, speed control is not used here so kept it HIGH when in motion and make it LOW to stop the motor
int m2ENB =13; // for speed control, speed control is not used here so kept it HIGH when in motion and make it LOW to stop the motor
//3rd Motor driver [CAR (INI,IN2)=RIGHT (IN3,IN4)=LEFT]
int m3IN1=14; // in1 14- A0 pin on arduino
int m3IN2=15; // in2 15-A1
int m3IN3=16; // in3 16-A2
int m3IN4=17; // in4 17-A3
int m3ENA=18; // ena 18-A4 ,here you may use speed control to control the speed of the locomotive part, for that you have to use the analogWrite() instead of digitalWrite()
int m3ENB=19; // enb 19-A5 ,here you may use speed control to control the speed of the locomotive part, for that you have to use the analogWrite() instead of digitalWrite()
void setup()
{
pinMode(m1IN1,OUTPUT);
pinMode(m1IN2,OUTPUT);
pinMode(m1IN3,OUTPUT);
pinMode(m1IN4,OUTPUT);
pinMode(m2IN1,OUTPUT);
pinMode(m2IN2,OUTPUT);
pinMode(m2IN3,OUTPUT);
pinMode(m2IN4,OUTPUT);
pinMode(m1ENA,OUTPUT);
pinMode(m1ENB,OUTPUT);
pinMode(m2ENA,OUTPUT);
pinMode(m2ENB,OUTPUT);
pinMode(m3IN1,OUTPUT);
pinMode(m3IN2,OUTPUT);
pinMode(m3IN3,OUTPUT);
pinMode(m3IN4,OUTPUT);
pinMode(m3ENA,OUTPUT);
pinMode(m3ENB,OUTPUT);
Serial.begin(9600);
}
void loop()
{
char ip='0';
while(Serial.available()>0) // check whether the serial port is receiving any value from the hc05 or not
{
ip=Serial.read(); // reads the data from the serial port
delay(10);
}
switch(ip)
{
case '6' : // SHOULDER UP
digitalWrite(m1IN3,HIGH);
digitalWrite(m1IN4,LOW);
digitalWrite(m1ENA,HIGH);
digitalWrite(m1ENB,HIGH);
break;
case '5' :// SHOULDER DOWN
digitalWrite(m1IN3,LOW);
digitalWrite(m1IN4,HIGH);
digitalWrite(m1ENA,HIGH);
digitalWrite(m1ENB,HIGH);
break;
case '1' :// ELBOW UP
digitalWrite(m2IN3,HIGH);
digitalWrite(m2IN4,LOW);
digitalWrite(m2ENA,HIGH);
digitalWrite(m2ENB,HIGH);
break;
case '2' :// ELBOW DOWN
digitalWrite(m2IN3,LOW);
digitalWrite(m2IN4,HIGH);
digitalWrite(m2ENA,HIGH);
digitalWrite(m2ENB,HIGH);
break;
case '8' :// GRIP CONTRACT
digitalWrite(m2IN1,HIGH);
digitalWrite(m2IN2,LOW);
digitalWrite(m2ENA,HIGH);
digitalWrite(m2ENB,HIGH);
break;
case '7' :// GRIP EXPAND
digitalWrite(m2IN1,LOW);
digitalWrite(m2IN2,HIGH);
digitalWrite(m2ENA,HIGH);
digitalWrite(m2ENB,HIGH);
break;
case '3' :// BASE CLOCK
digitalWrite(m1IN1,HIGH);
digitalWrite(m1IN2,LOW);
digitalWrite(m1ENA,HIGH);
digitalWrite(m1ENB,HIGH);
break;
case '4' :// BASE ANTICLOCK
digitalWrite(m1IN1,LOW);
digitalWrite(m1IN2,HIGH);
digitalWrite(m1ENA,HIGH);
digitalWrite(m1ENB,HIGH);
break;
case '9' :// OFF
digitalWrite(m1IN1,LOW);
digitalWrite(m1IN2,LOW);
digitalWrite(m1IN3,LOW);
digitalWrite(m1IN4,LOW);
digitalWrite(m1ENA,LOW);
digitalWrite(m1ENB,LOW);
digitalWrite(m2IN1,LOW);
digitalWrite(m2IN2,LOW);
digitalWrite(m2IN3,LOW);
digitalWrite(m2IN4,LOW);
digitalWrite(m2ENA,LOW);
digitalWrite(m2ENB,LOW);
digitalWrite(m3IN1,LOW);
digitalWrite(m3IN2,LOW);
digitalWrite(m3IN3,LOW);
digitalWrite(m3IN4,LOW);
digitalWrite(m3ENA,LOW);
digitalWrite(m3ENB,LOW);
break;
case 'A' :// FORWARD
digitalWrite(m3IN1,HIGH);
digitalWrite(m3IN2,LOW);
digitalWrite(m3IN3,HIGH);
digitalWrite(m3IN4,LOW);
digitalWrite(m3ENA,HIGH);
digitalWrite(m3ENB,HIGH);
break;
case 'D' :// BACKWARD
digitalWrite(m3IN1,LOW);
digitalWrite(m3IN2,HIGH);
digitalWrite(m3IN3,LOW);
digitalWrite(m3IN4,HIGH);
digitalWrite(m3ENA,HIGH);
digitalWrite(m3ENB,HIGH);
break;
case 'B' :// RIGHT
digitalWrite(m3IN1,LOW);
digitalWrite(m3IN2,HIGH);
digitalWrite(m3IN3,HIGH);
digitalWrite(m3IN4,LOW);
digitalWrite(m3ENA,HIGH);
digitalWrite(m3ENB,HIGH);
break;
case 'C' :// LEFT
digitalWrite(m3IN1,HIGH);
digitalWrite(m3IN2,LOW);
digitalWrite(m3IN3,LOW);
digitalWrite(m3IN4,HIGH);
digitalWrite(m3ENA,HIGH);
digitalWrite(m3ENB,HIGH);
break;
}
}












 fix the nut on the piston of the syringe using m-seal.
fix the nut on the piston of the syringe using m-seal. fix the syringe and motor in these way
fix the syringe and motor in these way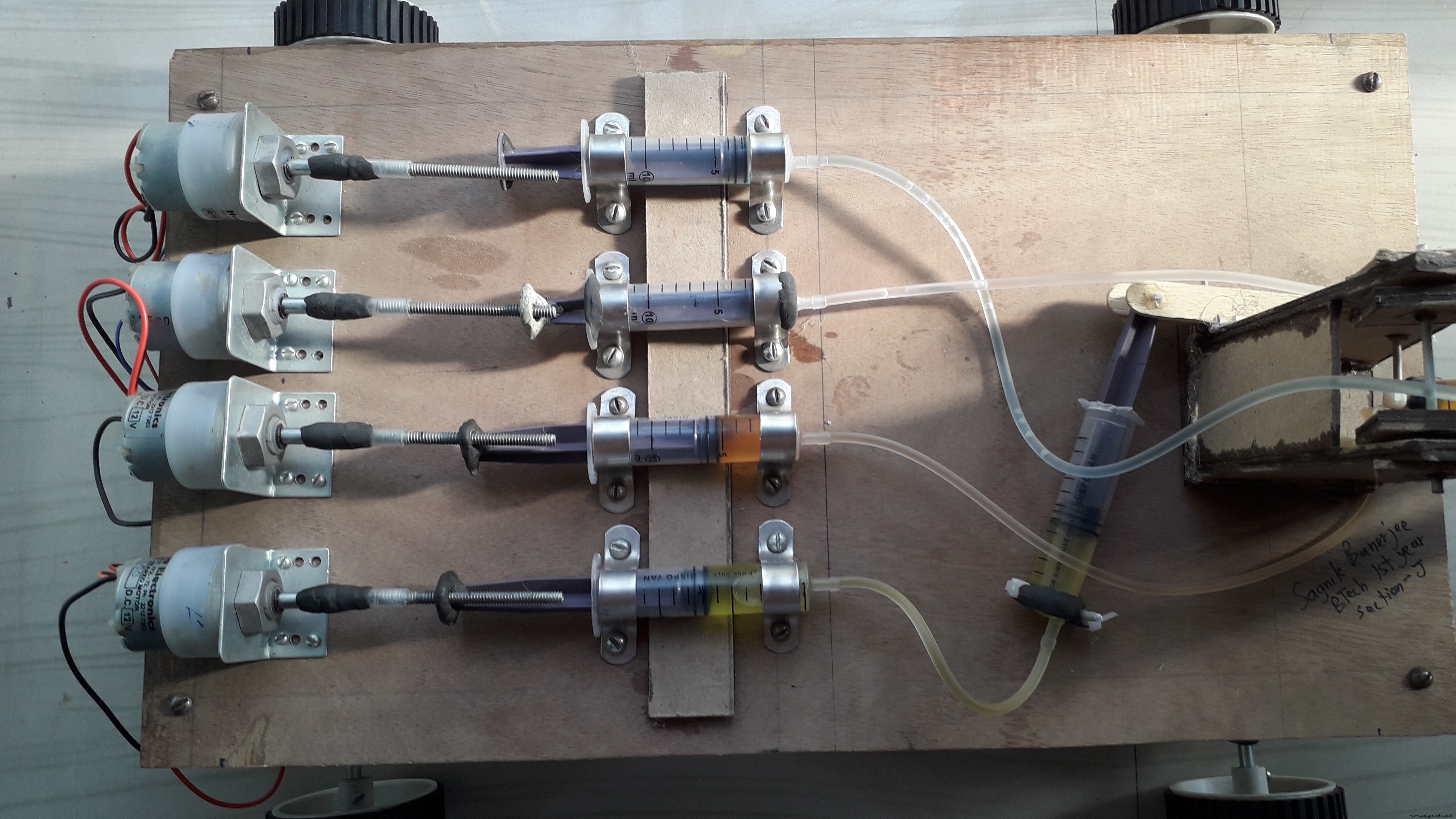 when the motor rotates clockwise it pushes the piston and when it rotates anticlockwise it pulls the piston
when the motor rotates clockwise it pushes the piston and when it rotates anticlockwise it pulls the piston https://www.youtube.com/watch?v=lhOF6cViZ4Q
https://www.youtube.com/watch?v=lhOF6cViZ4Q