


Mastering Motion Tracking Accuracy in Portable Devices
Portable, connected gadgets—smartphones, smartwatches, fitness trackers, and hearables—have reshaped everyday life. Beyond connectivity and processing power, the hidden hero behind many intuitive interactions is motion sensing.
From auto‑rotating phone screens and step counters to XR headset head‑tracking and touchless controls on earbuds, motion sensors create a fluid, natural user experience. For embedded engineers, selecting the right sensor suite is critical: you need precision without excess cost or power drain.
Motion Sensor Fundamentals
Three core sensors form the backbone of most IMUs (Inertial Measurement Units): accelerometers, gyroscopes, and magnetometers.
- Accelerometer: measures linear acceleration, including gravity, revealing the device’s orientation relative to the Earth’s pull.
- Gyroscope: captures angular velocity, providing rapid changes in orientation.
- Magnetometer: detects the Earth’s magnetic field, enabling heading determination.
Combining a 3‑axis accelerometer and gyroscope yields a 6‑axis IMU. Adding a 3‑axis magnetometer produces a 9‑axis IMU, the most common configuration for consumer wearables and XR gear.
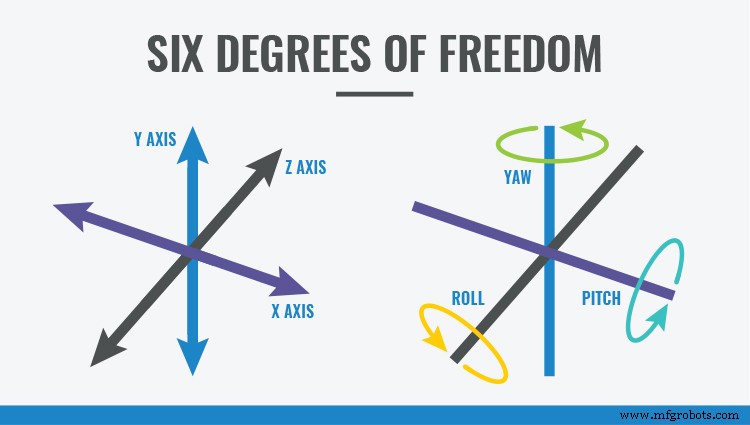
Figure 1: Motion sensing with an IMU (Source: CEVA)
Ensuring Accuracy
Heading accuracy is a primary metric for IMUs. Depending on the application, you might demand sub‑degree precision (e.g., XR headsets) or tolerate a few degrees (e.g., children’s toys). Consider stability over time, temperature drift, and the specific error budgets of your use case.
High‑quality motion tracking hinges on sensor fusion—combining data from multiple sensors to offset individual weaknesses. Think of each sensor as an advisor with a different specialty:
- Gyroscopes deliver reliable short‑term orientation changes but drift over longer periods.
- Accelerometers provide a steady gravity reference for long‑term stability, though they can be fooled by sustained linear acceleration.
- Magnetometers give absolute heading in magnetically quiet environments but can be corrupted by nearby ferrous structures.
Effective fusion algorithms weigh these sources, dynamically adjusting confidence levels when interference is detected. For example, if a magnetometer shows sudden fluctuations, the algorithm can rely more heavily on accelerometer and gyroscope data until the field stabilizes.
Sample rate also matters. While a basic step counter may function at a few Hz, most motion‑intensive applications require 100–400 Hz, and XR head‑tracking often demands 1 kHz or higher to maintain sub‑10 ms latency.
Calibration—both factory and in‑field—is essential to reduce bias and maintain consistency across units. Dynamic calibration, guided by the application’s known motion patterns, can further refine accuracy without incurring the cost of full factory calibration.
Verification should involve an independent reference, such as a calibrated robotic arm or a GPS‑based ground truth, to quantify error and enable compensation or alerting mechanisms.
Unlocking New Features
Accurate motion data unlocks intelligent interfaces and context awareness:
- Hearables can use tap detection to change tracks and remove‑in‑ear sensing to mute audio automatically.
- Contextual audio adjustments—dimming music when approaching a crosswalk—create safer, more immersive experiences.
- Advanced fitness analytics distinguish between walking, running, stair climbing, and estimate calorie burn by integrating accelerometer, gyroscope, barometer, and GPS data.

Figure 2: Hearables (Source: CEVA)
Sensor Fusion & Software Integration
Raw sensor streams are insufficient; they must be processed, calibrated, and fused. This complexity is often handled by dedicated sensor hub solutions that embed a low‑power MCU and pre‑optimized firmware.
For instance, the Bosch/CEVA Hillcrest Labs BNO080/085 family incorporates high‑performance accelerometers, gyroscopes, magnetometers, and an ARM Cortex‑M0+ core. Its MotionEngine™ firmware delivers 6‑ and 9‑axis tracking, activity classification (walking, running, standing), and is compatible with a wide range of embedded platforms.
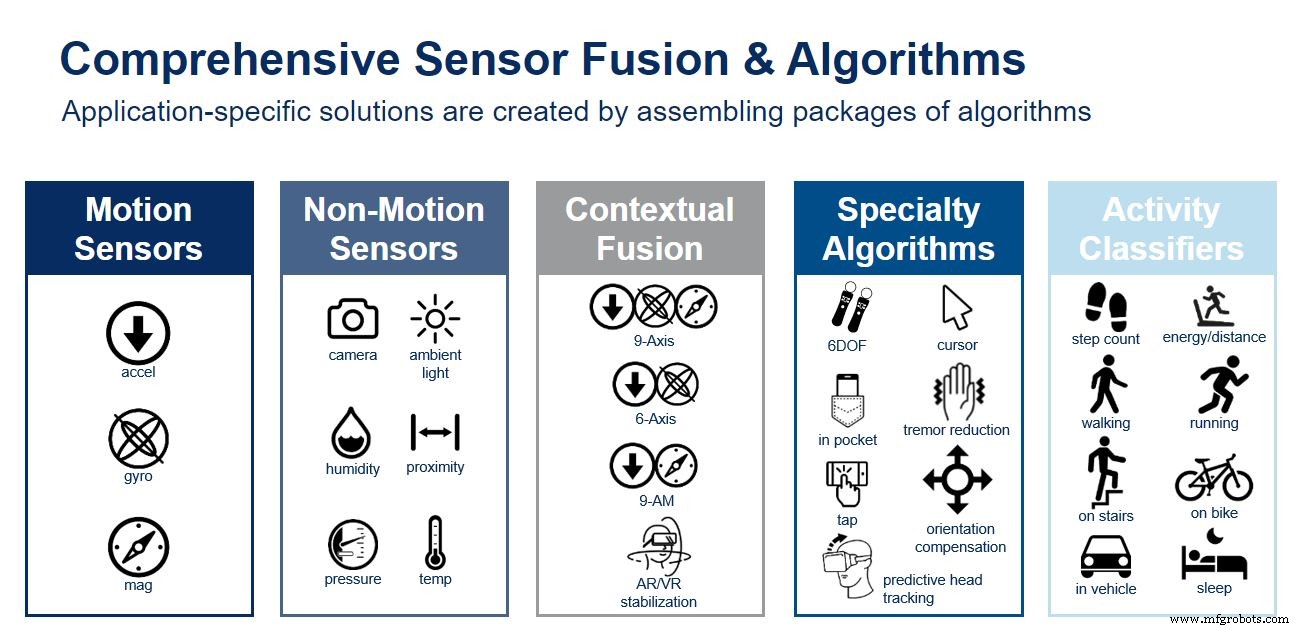
Figure 3: Comprehensive Sensor Fusion & Algorithms (Source: CEVA)
Offloading fusion to the sensor SiP keeps the main processor in low‑power sleep modes for always‑on tasks like step counting, extending battery life while preserving responsiveness.
Conclusion
Motion sensors are indispensable across consumer devices, but achieving the required precision demands thoughtful sensor selection, calibration, and fusion. By partnering with experienced vendors and leveraging integrated sensor hubs, developers can deliver accurate, feature‑rich experiences without compromising cost or power budgets.
Embedded
- How Graphite AM’s Jonathan Warbrick Drives Success in Industrial 3D Printing
- Choosing the Right Accuracy for Asset Tracking in Manufacturing & Healthcare
- M2M Asset Tracking: Unlocking Efficiency, Security, and Peace of Mind
- How Motion Tracking Drives Everyday Convenience
- STMicroelectronics LSM6DSOX: Machine‑Learning‑Enabled Inertial Sensor for Precise, Energy‑Efficient Activity Tracking
- Mar‑Bal’s University Outreach: Nurturing Talent & Driving Innovation Through Internship Partnerships
- Infrared Eye‑Motion Tracking with Arduino Pro Mini – LED Control Demo
- CNC Motion Control Systems: Explained Simply
- Linear Motion Technology: Precision Solutions for Automation
- Advanced 3D Motion Tracking System: Next-Gen Sensor for Autonomous Tech