


Foundations and Advancements of AC Motor Technology
Following Thomas Edison's deployment of a DC distribution network across the United States, industry gradually shifted toward the more cost‑effective AC system, with lighting performance on AC matching that on DC.
AC proved superior for long‑distance power transmission, reducing losses. Yet early attempts to adapt DC motor designs for AC encountered difficulties caused by time‑varying magnetic fields.
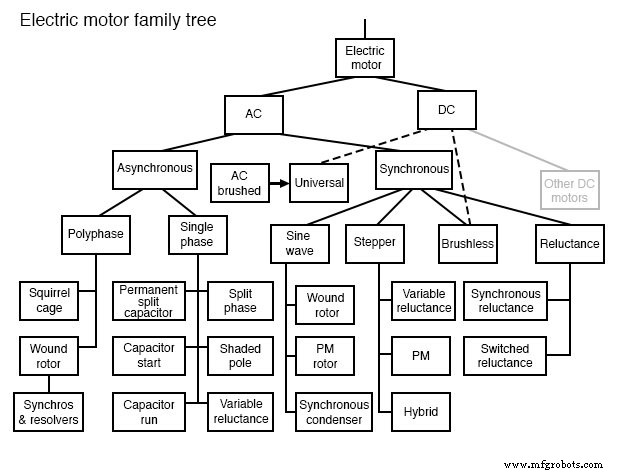
AC electric motor family diagram
Charles P. Steinmetz tackled these challenges by quantifying hysteresis losses in iron armatures, while Nikola Tesla conceived the first truly AC‑driven motor—a turbine powered by a rotating magnetic field rather than steam or water.
Tesla's AC induction motor has become the industry’s workhorse, prized for its robustness, simplicity, long service life, and minimal maintenance.
Brushed AC motors—mirroring their DC counterparts—continue to find use in small appliances, while Tesla induction motors dominate applications above 1 hp (≈750 W).
Today, solid‑state electronics convert DC into AC waveforms that drive brushless DC motors—essentially AC motors—replacing conventional brushed designs in numerous contexts. Similarly, stepper motors, a digital derivative, are powered by AC square waves produced by electronic control.
The diagram above traces the evolution of AC motor families discussed in this chapter.
Large marine vessels, such as cruise ships, and diesel‑electric locomotives have long substituted geared driveshafts with massive multi‑megawatt generators and motors.
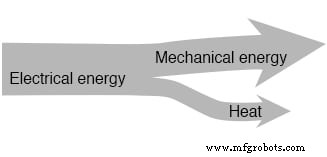
Motor system level diagram
At the system level, a motor converts electrical energy—provided by a voltage and current—into mechanical work. Inefficiencies arise because electric motors never reach 100% efficiency; a portion of the input power dissipates as heat via I²R (copper) losses in the windings.
This heat must be effectively removed; excessive thermal buildup can shorten motor life. Consequently, optimizing efficiency—minimizing heat loss—is paramount. AC motors also contend with unique losses such as hysteresis and eddy currents, absent in DC machines.
Hysteresis and Eddy Current
Early AC motor designers struggled with losses inherent to alternating magnetic fields—issues that emerged when DC motor concepts were applied to AC. While modern AC motors differ markedly from DC counterparts, resolving these challenges was essential for their development.
AC motor cores, both rotor and stator, consist of laminated steel sheets insulated with varnish. This construction interrupts conductive loops, thereby suppressing eddy currents (see figure).
These thin, insulated laminations resemble isolated transformer secondary turns, preventing large eddy currents. Incorporating silicon into the alloy further raises resistivity, reducing eddy‑current magnitude.
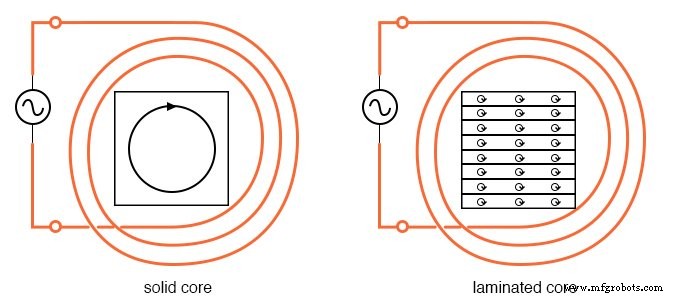
Eddy currents in iron cores
Using silicon‑grain‑oriented steel laminations further reduces hysteresis losses. Magnetic hysteresis manifests as a lag between magnetic field strength and the applied magnetizing force; even after de‑energizing a soft‑iron core, a residual magnetization B_R persists (illustrated below).
When the AC cycle reverses, the magnetic field must expend energy—coercive force H_C—to overcome this residual magnetization before the core can be demagnetized or magnetized in the opposite direction.
Hysteresis loss occurs on every AC polarity reversal and scales with the area of the B–H hysteresis loop. Soft iron alloys exhibit lower losses than hard, high‑carbon steels; silicon‑grain‑oriented steel (≈4 % Si) rolled to align grains offers the lowest losses.
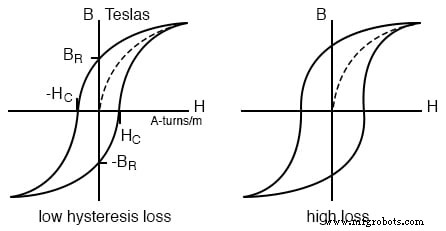
Hysteresis curves for low and high loss alloys
Steinmetz’s hysteresis law enabled accurate prediction of core losses, allowing engineers to design AC motors that met performance expectations—much like a pre‑constructed bridge that reliably withstands load.
Armed with insights into eddy currents and hysteresis, early designers first created AC commutator motors resembling DC machines. Today, such designs are a niche, while most AC motors—such as induction, synchronous, and brushless types—differ markedly from DC analogs.
Industrial Technology
- Verilog Basics: Designing Your First AND Gate
- Continuous Hinges (Piano Hinges): Design, Function, and Applications
- Foundations of DC Circuits: Understanding Direct Current and Core Electrical Concepts
- Understanding AC Circuits: A Beginner's Guide
- Getting Started with SPICE: A Text‑Based Circuit Simulation Tool
- Synchronous Motors: Design, Operation, and Applications
- Stepper Motors: Types, Characteristics, and Practical Applications
- Understanding AC Commutator Motors: Design, Types, and Applications
- Understanding Electrical Harmonics: Part 1 – Fundamentals & Impact
- Understanding BLDC Motors: A Professional Guide