Build the Simplest Arduino Line‑Following Robot with SparkFun L298
Components and supplies
 | | × | 1 | |
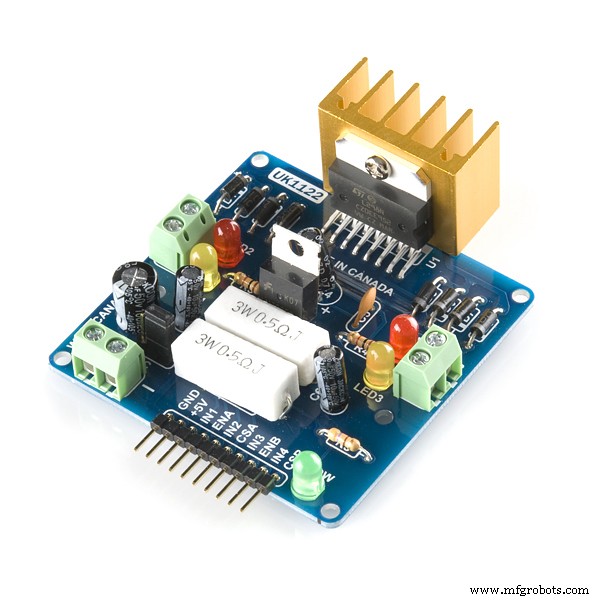 | | SparkFun Dual H-Bridge motor drivers L298 |
| × | 1 | |
| | × | 2 | |
 | | × | 1 | |
About this project
Line follower robot is hello world to robotics arena. This line follower is very simple, easy to build robot.
Code
- Arduino Based Line follower Robot
Arduino Based Line follower Robot C/C++
/*-------definning Inputs------*/
#define LS 2 // left sensor
#define RS 5 // right sensor
/*-------definning Outputs------*/
#define LM1 11 // left motor
#define LM2 10 // left motor
#define RM1 9 // right motor
#define RM2 6 // right motor
void setup()
{
pinMode(LS, INPUT);
pinMode(RS, INPUT);
pinMode(LM1, OUTPUT);
pinMode(LM2, OUTPUT);
pinMode(RM1, OUTPUT);
pinMode(RM2, OUTPUT);
}
void loop(){
if((digitalRead(LS)==LOW) && (digitalRead(RS)==LOW)) // Condition_1 stop
{
MoveForward();
}
if((digitalRead(LS)==HIGH) && (digitalRead(RS)==HIGH)) //CONDITION-2 FORWRD
{
Stop();
}
if((digitalRead(LS)==LOW) && (digitalRead(RS)==HIGH)) // RIGHT
{
TurnLeft();
}
if((digitalRead(LS)==HIGH) && (digitalRead(RS)==LOW))
{
TurnRight();
}
}
void MoveForward()
{
analogWrite(LM1, 50);
analogWrite(LM2, 0);
analogWrite(RM1, 50);
analogWrite(RM2, 0);
delay(20);
}
void TurnRight()
{
analogWrite(LM1, 0);
analogWrite(LM2, 60);
analogWrite(RM1, 60);
analogWrite(RM2, 0);
delay(30);
}
void TurnLeft()
{
analogWrite(LM1, 60);
analogWrite(LM2, 0);
analogWrite(RM1, 0);
analogWrite(RM2, 60);
delay(30);
}
void Stop()
{
analogWrite(LM1, 0);
analogWrite(LM2, 0);
analogWrite(RM1, 0);
analogWrite(RM2, 0);
delay(20);
}
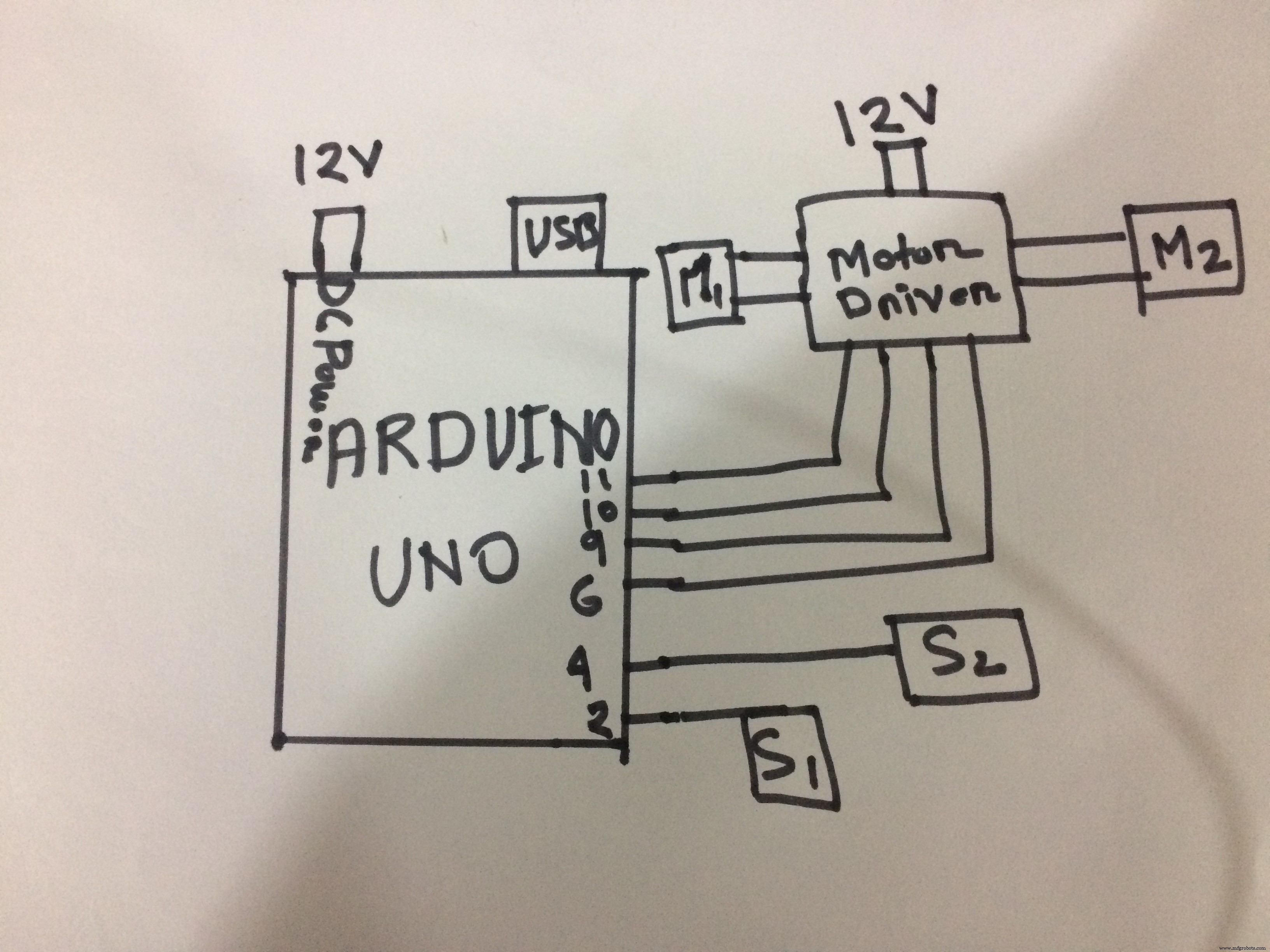
Schematics