


Reducing Noise and Vibration in Stepper Motor Systems with Allegro’s QuietStep
Stepper motors excel in precision motion control, yet torque ripple and current distortion can hinder performance. Discover Allegro MicroSystems’ QuietStep algorithm—a proven solution for quieter, smoother operation.
Stepper motors deliver precise open‑loop positioning and zero‑speed torque without sensors, making them ideal for applications such as CCTV systems, 3D printers, CNC machines, textile machinery, and pick‑and‑place robots—outperforming conventional DC or BLDC motors in many contexts.
Effective noise and vibration control is critical. In CCTV, any motor vibration reaches the image sensor and gimbal, degrading visual quality. In 3D printing, torque ripple and resonance can produce artifacts. By minimizing vibration, manufacturers achieve sharper images, higher‑resolution prints, and overall quieter equipment.
Proprietary algorithms now enable manufacturers to cut noise and vibration by smoothing torque ripple and current distortion. Understanding the root causes of vibration—and how they translate to audible noise—is essential before exploring these solutions. Let’s first examine the fundamentals of stepper motor operation.
Stepper Fundamentals
A bipolar stepper motor is a DC motor with discrete pole positions constructed of multiple coils arranged in two groups called phases. The current ratio between the two phases determines how the rotor is positioned between the two windings. In this way, a stepper motor can divide its position between two poles into smaller increments called microsteps.
The current in each stepper motor winding can be summed to create a vector where the magnitude of the vector is the torque. By examining the current in each of the two phases in polar space, we can visualize the vector as it rotates through each electrical cycle.
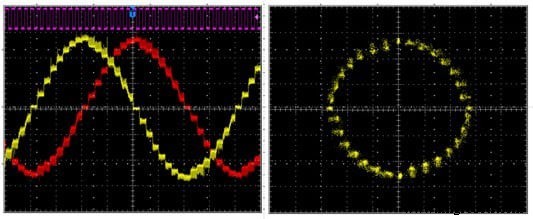
Figure 1. Phase currents for a bipolar stepper motor in an 1/8‑step interval: left panel shows time‑domain currents; right panel shows their polar‑domain representation.
In the time‑based domain, the torque is defined as the sum of the area under the two curves. In the polar domain, the magnitude of the vector is the torque. When the torque is constant through each electrical cycle, the motor operates smoothly. Variations in torque—known as torque ripple—generate vibration and audible noise, especially when the motor is not at resonance.
Controlling a Stepper Motor (Current Control)
Pulse‑width modulation (PWM) current control is the most common way to drive a stepper. By PWM‑chopping the output, the controller limits the current in each winding to maintain the desired rotor position.
The inherent nature of PWM current control introduces current ripple determined by the applied duty cycle, motor inductance, and supply voltage. To minimize ripple, the controller can shape the current decay during the PWM off‑time through various decay modes.
Common decay modes include fast decay—providing tight current control but higher ripple—and slow decay—offering lower ripple but susceptible to distortion when the back electromotive force (BEMF) limits the rate of current decrease.
When the winding current is falling, slow decay can’t reduce the current fast enough, leading to distortion on the falling edge. Fast decay, on the other hand, produces larger ripple but maintains accurate current regulation.
By combining fast and slow decay in a single PWM cycle—known as mixed decay—a compromise can be achieved that reduces ripple while preserving current control. The off‑time is divided into a fast‑decay portion followed by a slow‑decay portion, or vice versa, depending on the implementation.
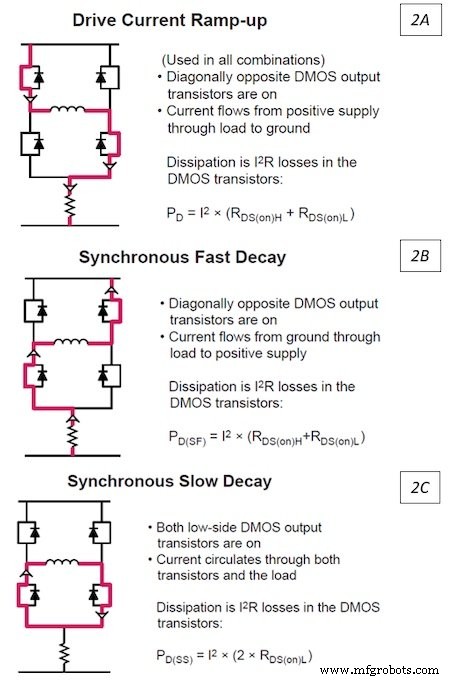
Figure 2. Current paths in a full‑bridge driver: drive and decay modes.
However, a fixed mixed‑decay ratio can cause distortion when the current rises or falls, especially for motors with specific LR time constants. An adaptive approach is required to maintain low ripple across all operating conditions.
A New Approach to Reducing Torque Ripple
Allegro MicroSystems has introduced QuietStep, a proprietary algorithm that dynamically adjusts the proportion of fast decay on a cycle‑by‑cycle basis. By starting with slow decay and adding fast decay only when necessary, QuietStep achieves precise current regulation with minimal ripple, without the need for complex software or external components.
Compared with traditional mixed decay, QuietStep cuts the current ripple by roughly half while still maintaining accurate current control across the entire electrical cycle.
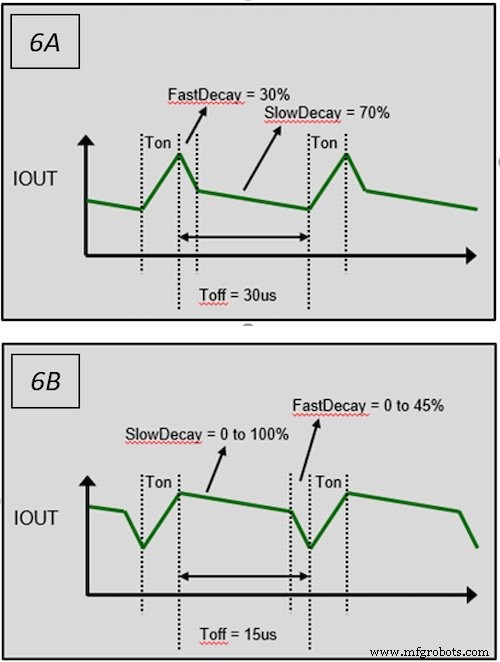
Figure 3. QuietStep’s dynamic decay adjustment versus fixed mixed decay.
Lowering system‑level current ripple directly reduces vibration and audible noise, improving image quality in CCTV systems and print fidelity in 3D printers. The technology also benefits a broad spectrum of motor‑control applications, from smart door locks to precision vision systems.
Deploying QuietStep with Bipolar Stepper Motor Drivers
When integrated into modern microstepping drivers such as the Allegro A5984, QuietStep automatically optimizes current waveforms across a wide range of speeds and motor characteristics. The driver supports bipolar stepper motors from full‑step to 1/32‑step modes, with an output drive capability of up to 40 V and ±2 A.
Implementing QuietStep simplifies system design, reduces the need for external tuning, and delivers measurable gains in step accuracy, noise reduction, and vibration control.
To learn more about the A5984 driver and QuietStep technology, visit the A5984 product page.
Allegro MicroSystems is a global leader in power and sensing solutions for motion control and energy‑efficient systems. For more information, visit the Allegro MicroSystems website.
Industry Articles are a form of content that allows industry partners to share useful news, messages, and technology with All About Circuits readers in a way editorial content is not well suited to. All Industry Articles are subject to strict editorial guidelines with the intention of offering readers useful news, technical expertise, or stories. The viewpoints and opinions expressed in Industry Articles are those of the partner and not necessarily those of All About Circuits or its writers.
Industrial robot
- Permissive and Interlock Circuits in Industrial Control Systems
- ACS712 Current Sensor: How It Works and Key Applications
- Vibration Sensors: Principles, Types, and Industrial Applications
- Renesas Expands RX24T & RX24U MCU Lineup with High‑Temperature G Versions for Motor Control
- Precise Stepper Motor Control: 28BYJ-48 with Arduino UNO & Joystick
- Master Stepper Motor Control with Arduino & A4988 Driver – Step-by-Step Guide
- Stepper Motors Explained: Types, Construction, Operation & Applications
- DIACs Explained: Design, Functionality, and Key Applications
- NEMA 23 Stepper Motor: Specs, Applications, and Practical Use Guide
- Applications & Characteristics of DC Motors: Performance, Efficiency, and Versatility