


DIY SMD Rework Station: Build a Professional PCB Rework Tool
Components and supplies
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 6 | |||
 |
| × | 1 | |||
 |
| × | 2 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 3 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 3 |
Necessary tools and machines
 |
|
Apps and online services
 |
| |||
|
About this project
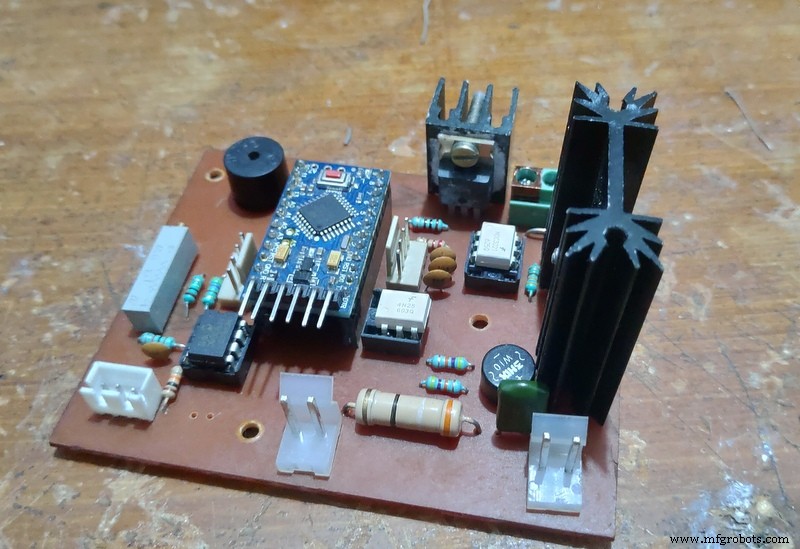
Intro: DIY SMD Rework StationIn this tutorial you can learn how to make a hot air gun controller using Arduino and other common components. In this project, PID algorithm is used to calculate the power required and is controlled by a isolated Triac driver.
This project uses a handle compatible with 858D. It has a K-type thermocouple, 700 watt 230 VAC heater and a 24 VDC fan.
This controller is efficient and reliable compared to the commercial one and is easy to build.
Step 1: WiringThe complete schematis shown on the picture below.
Wiring for I2C LCD module:
I2C Module<--------------> Arduino Pro Mini
GND<----------------------->GND<--------->GND
VCC<------------------------>VCC<--------->5V
SDA<------------------------------------------->A4
SCL<------------------------------------------->A5.
Wiring for rotary encoder module:
Encoder<---------------------->Arduino
GND<--------------------------->GND
+<-------------------------------->NC(Not Connected, code uses inbuilt input pull-up of arduino)
SW<----------------------------->D5
DT<------------------------------>D3
CLK<---------------------------->D4.
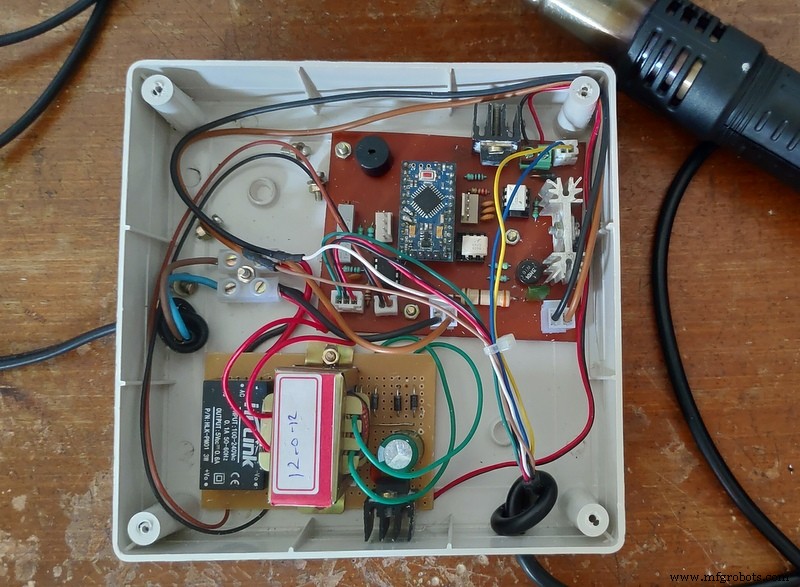
Wiring of handle: (7 wire)
3pin connector - (Green, Black, Red)
Red wire<----------------------->Thermocouple +
Green wire<-------------------->Reed Switch
Black wire<--------------------->Common ground.
2 pin connector - (Blue, Yellow)
Blue wire<--------------------------> Fan +0
Yellow wire<------------------------>Fan - (or GND)
2 Big pin connector -(White, Brown)
White wire<-----------------------> Heater
Brown wire<----------------------> Heater(no polarity)
NOTE:
The wiring of the hot air gun handle may be different for different type of wands. So, refer to the wiring diagram in the photo and follow the path of the wire to find the respective pins.
Step 2: Circuit DiagramThe circuit consists of 3 parts mainly.
The Interface Part:
It consists of a 1602 LCD display with I2C module and a rotary encoder with push button. The display shows the set temperature, current temperature, Fan speed and applied power and current status of the handle. The encoder is used for various inputs and to navigate through the options and controls.
The Sensor Part:
It consists of a K-type thermocouple for temperature sensing and a reed switch for determining the position of the handle. The thermocouple's voltage is amplified by the op-amp to a voltage level measurable by the arduino. The gain of the op-amp is controlled by 200K trim pot.
The Controller Part:
There are mainly 2 controllers in this circuit. The one is a simple PWM Fan speed controller with a MOSFET. The other one is a isolated controller for heater. It consists of a TRIAC driven by a opto-coupled DIAC and it is done by controlling the number of wave cycles that is delivered to the heater. The 4N25 optocoupler helps to maintain the sync with the AC waveform.
Step 3: PCBThe circuit of this project is a bit complicated, So I recommend you to use a printed board than a dot PCB. If you want to make your own PCB I have attached the eagle files at the end of the project. But, If you want to get them done by a PCB manufacturing company you can order it from JLCPCB
. You can view the Easy EDA design through this link : https://easyeda.com/ManojBR/harws1-1
Step 4: The Code and LibrariesThe program is the most crucial part of the project and thanks a lot for sfrwmaker writing the program. The program uses PID algorithm to control the power to maintain the set temperature. It works by controlling the number of wave cycles delivered to the handle per second.
When the controller is turned on the wand will be in OFF state. By rotating the encoder the temperature and fan speed can be adjusted. Short press of the encoder will switch between the Fan speed and Set temperature adjustment.
The Hot air gun starts heating as soon as it is lifted up from the holder and shows Ready and make a short beep when it reaches the set temperature. It will turn off heating as soon as it is put back into the holder. But, the fan will continue to blow until it reaches the safe temperature. After the temperature falls below 50 C it will make a short beep and displays COLD.
When the hot air gun is off, the controller will enter Setup mode if the encoder is long pressed.
The setup mode has Calibrate, Tune, Save and Cancel and Reset Config options.
Note: If you are using PCB from easyEDA then you should change the pin number of reed switch to pin no. 8 and Buzzer pin to pin no.6
you have to install the Commoncontrols-master library andtime-master library for the code to work properly.
Caution: Do not connect the controller to the power outlet when flashing the firmware. Non-isolated power supply of the fan could damage your laptop.
download sketch source code from the project page.
Step 5: SetupThe temperature readings should be calibrated with the original value to get reasonable readings. So, in order to do that you should follow the following steps.
First, go to the setup mode and select the Tune option.In the tune mode the internal temperature (0-1023) is displayed on the screen.Rotate the encoder to manually select the applied power to the hot air gun. Heat the gun to 400 degrees.When the temperature and dispersion become low, the controller beeps. Then tune the trim-pot to set the internal temperature about 900 (in the internal units). Long press to the encoder return to the menu
Then, go to the setup mode select Calibrate option. Choose the calibration point: 200, 300 or 400 degrees, press the encoder. The hot gun will reach the desired temperature and beeps. By rotating the encoder, enter the real temperature. Then select another reference point and repeat this process for all the calibration point.
After this long press and come to main screen and then again go to Setup mode and select save.
And now the Hot air rework station is done.
Step 6: Video!Have a look at the working of controller in the video.
Thank you sfrwmaker for writing the code.
Thanks to LCSC for their support. LCSC Electronics is one of the fastest growing suppliers of electronic components in China. LCSC has been committed to offering multitudinous, genuine and in-stock items, since its founding in 2011. Aiming to provide the whole world with more superior parts from Asia. More details please visit: https://lcsc.com/
If you have to make your own PCB at home, checkout this tutorial: https://www.instructables.com/id/PCB-Making-1/
Thank you.
Code
- Firmware 1.4
Firmware 1.4C/C++
Active/passive buzzer support. Pleas change the BUZZER_ACTIVE parameterNo more increased rotary encoder. Value changes by 1.
/*
* Hot air gun controller based on atmega328 IC
* Version 1.4
* Released Dec 05, 2020
*/
#include <avr/io.h>
#include <avr/interrupt.h>
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <CommonControls.h>
#include <EEPROM.h>
#include <SPI.h>
const uint16_t temp_minC = 100; // Minimum temperature the controller can check accurately
const uint16_t temp_maxC = 500; // Maximum possible temperature
const uint16_t temp_ambC = 25; // Average ambient temperature
const uint16_t temp_tip[3] = {200, 300, 400}; // Temperature reference points for calibration
const uint16_t min_working_fan = 100; // Minimal possible fan speed
const uint8_t AC_SYNC_PIN = 2; // Outlet 220 v synchronization pin. Do not change!
const uint8_t HOT_GUN_PIN = 7; // Hot gun heater management pin
const uint8_t FAN_GUN_PIN = 9; // Hot gun fan management pin. Do not change!
const uint8_t TEMP_GUN_PIN = A0; // Hot gun temperature checking pin
const uint8_t R_MAIN_PIN = 3; // Rotary encoder main pin. Do not change!
const uint8_t R_SECD_PIN = 4; // Rotary encoder secondary pin
const uint8_t R_BUTN_PIN = 5; // Rotary encoder button pin
const uint8_t REED_SW_PIN = 8; // Reed switch pin
const uint8_t BUZZER_PIN = 6; // Buzzer pin
const bool BUZZER_ACTIVE = true; // Active buzzer beeps when +5v supplied to it
//------------------------------------------ Configuration data ------------------------------------------------
/* Config record in the EEPROM has the following format:
* uint32_t ID each time increment by 1
* struct cfg config data, 8 bytes
* byte CRC the checksum
*/
struct cfg {
uint32_t calibration; // Packed calibration data by three temperature points
uint16_t temp; // The preset temperature of the IRON in internal units
uint8_t fan; // The preset fan speed 0 - 255
uint8_t off_timeout; // Automatic switch-off timeout
};
class CONFIG {
public:
CONFIG() {
can_write = false;
buffRecords = 0;
rAddr = wAddr = 0;
eLength = 0;
nextRecID = 0;
uint8_t rs = sizeof(struct cfg) + 5; // The total config record size
// Select appropriate record size; The record size should be power of 2, i.e. 8, 16, 32, 64, ... bytes
for (record_size = 8; record_size < rs; record_size <<= 1);
}
void init();
bool load(void);
void getConfig(struct cfg &Cfg); // Copy config structure from this class
void updateConfig(struct cfg &Cfg); // Copy updated config into this class
bool save(void); // Save current config copy to the EEPROM
bool saveConfig(struct cfg &Cfg); // write updated config into the EEPROM
protected:
struct cfg Config;
private:
bool readRecord(uint16_t addr, uint32_t &recID);
bool can_write; // The flag indicates that data can be saved
uint8_t buffRecords; // Number of the records in the outpt buffer
uint16_t rAddr; // Address of thecorrect record in EEPROM to be read
uint16_t wAddr; // Address in the EEPROM to start write new record
uint16_t eLength; // Length of the EEPROM, depends on arduino model
uint32_t nextRecID; // next record ID
uint8_t record_size; // The size of one record in bytes
};
// Read the records until the last one, point wAddr (write address) after the last record
void CONFIG::init(void) {
eLength = EEPROM.length();
uint32_t recID;
uint32_t minRecID = 0xffffffff;
uint16_t minRecAddr = 0;
uint32_t maxRecID = 0;
uint16_t maxRecAddr = 0;
uint8_t records = 0;
nextRecID = 0;
// read all the records in the EEPROM find min and max record ID
for (uint16_t addr = 0; addr < eLength; addr += record_size) {
if (readRecord(addr, recID)) {
++records;
if (minRecID > recID) {
minRecID = recID;
minRecAddr = addr;
}
if (maxRecID < recID) {
maxRecID = recID;
maxRecAddr = addr;
}
} else {
break;
}
}
if (records == 0) {
wAddr = rAddr = 0;
can_write = true;
return;
}
rAddr = maxRecAddr;
if (records < (eLength / record_size)) { // The EEPROM is not full
wAddr = rAddr + record_size;
if (wAddr > eLength) wAddr = 0;
} else {
wAddr = minRecAddr;
}
can_write = true;
}
void CONFIG::getConfig(struct cfg &Cfg) {
memcpy(&Cfg, &Config, sizeof(struct cfg));
}
void CONFIG::updateConfig(struct cfg &Cfg) {
memcpy(&Config, &Cfg, sizeof(struct cfg));
}
bool CONFIG::saveConfig(struct cfg &Cfg) {
updateConfig(Cfg);
return save(); // Save new data into the EEPROM
}
bool CONFIG::save(void) {
if (!can_write) return can_write;
if (nextRecID == 0) nextRecID = 1;
uint16_t startWrite = wAddr;
uint32_t nxt = nextRecID;
uint8_t summ = 0;
for (uint8_t i = 0; i < 4; ++i) {
EEPROM.write(startWrite++, nxt & 0xff);
summ <<=2; summ += nxt;
nxt >>= 8;
}
uint8_t* p = (byte *)&Config;
for (uint8_t i = 0; i < sizeof(struct cfg); ++i) {
summ <<= 2; summ += p[i];
EEPROM.write(startWrite++, p[i]);
}
summ ++; // To avoid empty records
EEPROM.write(wAddr+record_size-1, summ);
rAddr = wAddr;
wAddr += record_size;
if (wAddr > EEPROM.length()) wAddr = 0;
nextRecID ++; // Get ready to write next record
return true;
}
bool CONFIG::load(void) {
bool is_valid = readRecord(rAddr, nextRecID);
nextRecID ++;
return is_valid;
}
bool CONFIG::readRecord(uint16_t addr, uint32_t &recID) {
uint8_t Buff[record_size];
for (uint8_t i = 0; i < record_size; ++i)
Buff[i] = EEPROM.read(addr+i);
uint8_t summ = 0;
for (byte i = 0; i < sizeof(struct cfg) + 4; ++i) {
summ <<= 2; summ += Buff[i];
}
summ ++; // To avoid empty fields
if (summ == Buff[record_size-1]) { // Checksumm is correct
uint32_t ts = 0;
for (char i = 3; i >= 0; --i) {
ts <<= 8;
ts |= Buff[byte(i)];
}
recID = ts;
memcpy(&Config, &Buff[4], sizeof(struct cfg));
return true;
}
return false;
}
//------------------------------------------ class HOT GUN CONFIG ----------------------------------------------
class HOTGUN_CFG : public CONFIG {
public:
HOTGUN_CFG() { }
void init(void);
uint16_t tempPreset(void); // The preset temperature in internal units
uint8_t fanPreset(void); // The preset fan speed 0 - 255
uint16_t tempInternal(uint16_t temp); // Translate the human readable temperature into internal value
uint16_t tempHuman(uint16_t temp); // Translate temperature from internal units to the Celsius
void save(uint16_t temp, uint8_t fanSpeed); // Save preset temperature in the internal units and fan speed
void applyCalibrationData(uint16_t tip[3]);
void getCalibrationData(uint16_t tip[3]);
void saveCalibrationData(uint16_t tip[3]);
void setDefaults(bool Write); // Set default parameter values if failed to load data from EEPROM
private:
uint16_t t_tip[3];
const uint16_t def_tip[3] = {587, 751, 850}; // Default values of internal sensor readings at reference temperatures
const uint16_t min_temp = 50;
const uint16_t max_temp = 900;
const uint16_t def_temp = 600; // Default preset temperature
const uint8_t def_fan = 64; // Default preset fan speed 0 - 255
const uint16_t ambient_temp = 0;
const uint16_t ambient_tempC= 25;
};
void HOTGUN_CFG::init(void) {
CONFIG::init();
if (!CONFIG::load()) setDefaults(false); // If failed to load the data from EEPROM, initialize the config data with the default values
uint32_t cd = Config.calibration;
t_tip[0] = cd & 0x3FF; cd >>= 10; // 10 bits per calibration parameter, because the ADC readings are 10 bits
t_tip[1] = cd & 0x3FF; cd >>= 10;
t_tip[2] = cd & 0x3FF;
// Check the tip calibration is correct
if ((t_tip[0] >= t_tip[1]) || (t_tip[1] >= t_tip[2])) {
setDefaults(false);
for (uint8_t i = 0; i < 3; ++i)
t_tip[i] = def_tip[i];
}
return;
}
uint32_t calibration; // Packed calibration data by three temperature points
uint16_t temp; // The preset temperature of the IRON in internal units
uint8_t fan; // The preset fan speed 0 - 255
uint8_t off_timeout; // Automatic switch-off timeout
uint16_t HOTGUN_CFG::tempPreset(void) {
return Config.temp;
}
uint8_t HOTGUN_CFG::fanPreset(void) {
return Config.fan;
}
uint16_t HOTGUN_CFG::tempInternal(uint16_t t) { // Translate the human readable temperature into internal value
t = constrain(t, temp_minC, temp_maxC);
uint16_t left = 0;
uint16_t right = 1023; // Maximum temperature value in internal units
uint16_t temp = map(t, temp_tip[0], temp_tip[2], t_tip[0], t_tip[2]);
if (temp > (left+right)/ 2) {
temp -= (right-left) / 4;
} else {
temp += (right-left) / 4;
}
for (uint8_t i = 0; i < 20; ++i) {
uint16_t tempH = tempHuman(temp);
if (tempH == t) {
return temp;
}
uint16_t new_temp;
if (tempH < t) {
left = temp;
new_temp = (left+right)/2;
if (new_temp == temp)
new_temp = temp + 1;
} else {
right = temp;
new_temp = (left+right)/2;
if (new_temp == temp)
new_temp = temp - 1;
}
temp = new_temp;
}
return temp;
}
// Thanslate temperature from internal units to the human readable value (Celsius or Fahrenheit)
uint16_t HOTGUN_CFG::tempHuman(uint16_t temp) {
uint16_t tempH = 0;
if (temp <= ambient_temp) {
tempH = ambient_tempC;
} else if (temp < t_tip[0]) {
tempH = map(temp, ambient_temp, t_tip[0], ambient_tempC, temp_tip[0]);
} else if (temp <= t_tip[1]) {
tempH = map(temp, t_tip[0], t_tip[1], temp_tip[0], temp_tip[1]);
} else if (temp <= t_tip[2]) {
tempH = map(temp, t_tip[1], t_tip[2], temp_tip[1], temp_tip[2]);
} else {
tempH = map(temp, t_tip[0], t_tip[2], temp_tip[0], temp_tip[2]);
}
return tempH;
}
void HOTGUN_CFG::save(uint16_t temp, uint8_t fanSpeed) {
Config.temp = constrain(temp, min_temp, max_temp);
Config.fan = fanSpeed;
CONFIG::save(); // Save new data into the EEPROM
}
void HOTGUN_CFG::applyCalibrationData(uint16_t tip[3]) {
if (tip[0] < ambient_temp) {
uint16_t t = ambient_temp + tip[1];
tip[0] = t >> 1;
}
t_tip[0] = tip[0];
t_tip[1] = tip[1];
if (tip[2] > max_temp) tip[2] = max_temp;
t_tip[2] = tip[2];
}
void HOTGUN_CFG::getCalibrationData(uint16_t tip[3]) {
tip[0] = t_tip[0];
tip[1] = t_tip[1];
tip[2] = t_tip[2];
}
void HOTGUN_CFG::saveCalibrationData(uint16_t tip[3]) {
if (tip[2] > max_temp) tip[2] = max_temp;
uint32_t cd = tip[2] & 0x3FF; cd <<= 10; // Pack tip calibration data in one 32-bit word: 10-bits per value
cd |= tip[1] & 0x3FF; cd <<= 10;
cd |= tip[0];
Config.calibration = cd;
t_tip[0] = tip[0];
t_tip[1] = tip[1];
t_tip[2] = tip[2];
}
void HOTGUN_CFG::setDefaults(bool Write) {
uint32_t c = def_tip[2] & 0x3FF; c <<= 10;
c |= def_tip[1] & 0x3FF; c <<= 10;
c |= def_tip[0] & 0x3FF;
Config.calibration = c;
Config.temp = def_temp;
Config.fan = def_fan;
if (Write) {
CONFIG::save();
}
}
//------------------------------------------ class BUZZER ------------------------------------------------------
class BUZZER {
public:
BUZZER(byte buzzerP, bool active = true)
{ buzzer_pin = buzzerP; this->active = active; }
void init(void);
void shortBeep(void);
void lowBeep(void);
void doubleBeep(void);
void failedBeep(void);
private:
byte buzzer_pin;
bool active;
};
void BUZZER::init(void) {
pinMode(buzzer_pin, OUTPUT);
if (active) {
digitalWrite(buzzer_pin, LOW);
} else {
noTone(buzzer_pin);
}
}
void BUZZER::shortBeep(void) {
if (active) {
digitalWrite(buzzer_pin, HIGH);
delay(80);
digitalWrite(buzzer_pin, LOW);
} else {
tone(buzzer_pin, 3520, 160);
}
}
void BUZZER::lowBeep(void) {
if (active) {
digitalWrite(buzzer_pin, HIGH);
delay(160);
digitalWrite(buzzer_pin, LOW);
} else {
tone(buzzer_pin, 880, 160);
}
}
void BUZZER::doubleBeep(void) {
if (active) {
digitalWrite(buzzer_pin, HIGH);
delay(160);
digitalWrite(buzzer_pin, LOW);
delay(150);
digitalWrite(buzzer_pin, HIGH);
delay(160);
digitalWrite(buzzer_pin, LOW);
} else {
tone(buzzer_pin, 3520, 160);
delay(300);
tone(buzzer_pin, 3520, 160);
}
}
void BUZZER::failedBeep(void) {
if (active) {
digitalWrite(buzzer_pin, HIGH);
delay(170);
digitalWrite(buzzer_pin, LOW);
delay(10);
digitalWrite(buzzer_pin, HIGH);
delay(80);
digitalWrite(buzzer_pin, LOW);
delay(100);
digitalWrite(buzzer_pin, HIGH);
delay(80);
digitalWrite(buzzer_pin, LOW);
} else {
tone(buzzer_pin, 3520, 160);
delay(170);
tone(buzzer_pin, 880, 250);
delay(260);
tone(buzzer_pin, 3520, 160);
}
}
//------------------------------------------ class lcd DSPLay for soldering IRON -----------------------------
class DSPL : protected LiquidCrystal_I2C {
public:
DSPL(void) : LiquidCrystal_I2C(0x27, 16, 2) { }
void init(void);
void clear(void) { LiquidCrystal_I2C::clear(); }
void tSet(uint16_t t, bool Celsius = true); // Show the preset temperature
void tCurr(uint16_t t); // Show the current temperature
void tInternal(uint16_t t); // Show the current temperature in internal units
void tReal(uint16_t t); // Show the real temperature in Celsius in calibrate mode
void fanSpeed(uint8_t s); // Show the fan speed
void appliedPower(uint8_t p, bool show_zero = true); // Show applied power (%)
void setupMode(uint8_t mode);
void msgON(void); // Show message: "ON"
void msgOFF(void);
void msgReady(void);
void msgCold(void);
void msgFail(void); // Show 'Fail' message
void msgTune(void); // Show 'Tune' message
private:
bool full_second_line; // Whether the second line is full with the message
char temp_units;
const uint8_t custom_symbols[3][8] = {
{ 0b00110, // Degree
0b01001,
0b01001,
0b00110,
0b00000,
0b00000,
0b00000,
0b00000
},
{ 0b00100, // Fan sign
0b01100,
0b01100,
0b00110,
0b01011,
0b11001,
0b10000,
0b00000
},
{ 0b00011, // Power sign
0b00110,
0b01100,
0b11111,
0b00110,
0b01100,
0b01000,
0b10000
}
};
};
void DSPL::init(void) {
LiquidCrystal_I2C::begin();
LiquidCrystal_I2C::clear();
for (uint8_t i = 0; i < 3; ++i)
LiquidCrystal_I2C::createChar(i+1, (uint8_t *)custom_symbols[i]);
full_second_line = false;
temp_units = 'C';
}
void DSPL::tSet(uint16_t t, bool Celsius) {
char buff[10];
if (Celsius) {
temp_units = 'C';
} else {
temp_units = 'F';
}
LiquidCrystal_I2C::setCursor(0, 0);
sprintf(buff, "Set:%3d%c%c", t, (char)1, temp_units);
LiquidCrystal_I2C::print(buff);
}
void DSPL::tCurr(uint16_t t) {
char buff[6];
LiquidCrystal_I2C::setCursor(0, 1);
if (t < 1000) {
sprintf(buff, "%3d%c ", t, (char)1);
} else {
LiquidCrystal_I2C::print(F("xxx"));
return;
}
LiquidCrystal_I2C::print(buff);
if (full_second_line) {
LiquidCrystal_I2C::print(F(" "));
full_second_line = false;
}
}
void DSPL::tInternal(uint16_t t) {
char buff[6];
LiquidCrystal_I2C::setCursor(0, 1);
if (t < 1023) {
sprintf(buff, "%4d ", t);
} else {
LiquidCrystal_I2C::print(F("xxxx"));
return;
}
LiquidCrystal_I2C::print(buff);
if (full_second_line) {
LiquidCrystal_I2C::print(F(" "));
full_second_line = false;
}
}
void DSPL::tReal(uint16_t t) {
char buff[6];
LiquidCrystal_I2C::setCursor(11, 1);
if (t < 1000) {
sprintf(buff, ">%3d%c", t, (char)1);
} else {
LiquidCrystal_I2C::print(F("xxx"));
return;
}
LiquidCrystal_I2C::print(buff);
}
void DSPL::fanSpeed(uint8_t s) {
char buff[6];
s = map(s, 0, 255, 0, 99);
sprintf(buff, " %c%2d%c", (char)2, s, '%');
LiquidCrystal_I2C::setCursor(11, 1);
LiquidCrystal_I2C::print(buff);
}
void DSPL::appliedPower(uint8_t p, bool show_zero) {
char buff[6];
if (p > 99) p = 99;
LiquidCrystal_I2C::setCursor(5, 1);
if (p == 0 && !show_zero) {
LiquidCrystal_I2C::print(F(" "));
} else {
sprintf(buff, " %c%2d%c", (char)3, p, '%');
LiquidCrystal_I2C::print(buff);
}
}
void DSPL::setupMode(byte mode) {
LiquidCrystal_I2C::clear();
LiquidCrystal_I2C::print(F("setup"));
LiquidCrystal_I2C::setCursor(1,1);
switch (mode) {
case 0: // tip calibrate
LiquidCrystal_I2C::print(F("calibrate"));
break;
case 1: // tune
LiquidCrystal_I2C::print(F("tune"));
break;
case 2: // save
LiquidCrystal_I2C::print(F("save"));
break;
case 3: // cancel
LiquidCrystal_I2C::print(F("cancel"));
break;
case 4: // set defaults
LiquidCrystal_I2C::print(F("reset config"));
break;
default:
break;
}
}
void DSPL::msgON(void) {
LiquidCrystal_I2C::setCursor(10, 0);
LiquidCrystal_I2C::print(F(" ON"));
}
void DSPL::msgOFF(void) {
LiquidCrystal_I2C::setCursor(10, 0);
LiquidCrystal_I2C::print(F(" OFF"));
}
void DSPL::msgReady(void) {
LiquidCrystal_I2C::setCursor(10, 0);
LiquidCrystal_I2C::print(F(" Ready"));
}
void DSPL::msgCold(void) {
LiquidCrystal_I2C::setCursor(10, 0);
LiquidCrystal_I2C::print(F(" Cold"));
}
void DSPL::msgFail(void) {
LiquidCrystal_I2C::setCursor(0, 1);
LiquidCrystal_I2C::print(F(" -== Failed ==- "));
}
void DSPL::msgTune(void) {
LiquidCrystal_I2C::setCursor(0, 0);
LiquidCrystal_I2C::print(F("Tune"));
}
//------------------------------------------ class HISTORY ----------------------------------------------------
#define H_LENGTH 16
class HISTORY {
public:
HISTORY(void) { len = 0; }
void init(void) { len = 0; }
uint16_t last(void);
uint16_t top(void) { return queue[0]; }
void put(uint16_t item); // Put new entry to the history
uint16_t average(void); // calculate the average value
float dispersion(void); // calculate the math dispersion
private:
volatile uint16_t queue[H_LENGTH];
volatile byte len; // The number of elements in the queue
volatile byte index; // The current element position, use ring buffer
};
void HISTORY::put(uint16_t item) {
if (len < H_LENGTH) {
queue[len++] = item;
} else {
queue[index ] = item;
if (++index >= H_LENGTH) index = 0; // Use ring buffer
}
}
uint16_t HISTORY::last(void) {
if (len == 0) return 0;
uint8_t i = len - 1;
if (index)
i = index - 1;
return queue[i];
}
uint16_t HISTORY::average(void) {
uint32_t sum = 0;
if (len == 0) return 0;
if (len == 1) return queue[0];
for (uint8_t i = 0; i < len; ++i) sum += queue[i];
sum += len >> 1; // round the average
sum /= len;
return uint16_t(sum);
}
float HISTORY::dispersion(void) {
if (len < 3) return 1000;
uint32_t sum = 0;
uint32_t avg = average();
for (uint8_t i = 0; i < len; ++i) {
long q = queue[i];
q -= avg;
q *= q;
sum += q;
}
sum += len << 1;
float d = (float)sum / (float)len;
return d;
}
//-------------------------------------------class Exponential average ----------------------------------------
class EMP_AVERAGE {
public:
EMP_AVERAGE(uint8_t h_length = 8) { emp_k = h_length; emp_data = 0; }
void length(uint8_t h_length) { emp_k = h_length; emp_data = 0; }
void reset(void) { emp_data = 0; }
int32_t average(int32_t value);
void update(int32_t value);
int32_t read(void);
private:
volatile uint8_t emp_k = 8;
volatile uint32_t emp_data = 0;
};
int32_t EMP_AVERAGE::average(int32_t value) {
uint8_t round_v = emp_k >> 1;
update(value);
return (emp_data + round_v) / emp_k;
}
void EMP_AVERAGE::update(int32_t value) {
uint8_t round_v = emp_k >> 1;
emp_data += value - (emp_data + round_v) / emp_k;
}
int32_t EMP_AVERAGE::read(void) {
uint8_t round_v = emp_k >> 1;
return (emp_data + round_v) / emp_k;
}
//------------------------------------------ class PID algoritm to keep the temperature -----------------------
/* The PID algorithm
* Un = Kp*(Xs - Xn) + Ki*summ{j=0; j<=n}(Xs - Xj) + Kd(Xn - Xn-1),
* Where Xs - is the setup temperature, Xn - the temperature on n-iteration step
* In this program the interactive formula is used:
* Un = Un-1 + Kp*(Xn-1 - Xn) + Ki*(Xs - Xn) + Kd*(Xn-2 + Xn - 2*Xn-1)
* With the first step:
* U0 = Kp*(Xs - X0) + Ki*(Xs - X0); Xn-1 = Xn;
*
* PID coefficients history:
* 10/14/2017 [768, 32, 328]
* 11/27/2019 [ 2009, 1600, 20]
* 04/27/2020 [ 50, 16, 50]
*/
class PID {
public:
PID(void) {
Kp = 50;
Ki = 16;
Kd = 50;
}
void resetPID(int temp = -1); // reset PID algorithm history parameters
// Calculate the power to be applied
long reqPower(int temp_set, int temp_curr);
int changePID(uint8_t p, int k); // set or get (if parameter < 0) PID parameter
private:
void debugPID(int t_set, int t_curr, long kp, long ki, long kd, long delta_p);
int temp_h0, temp_h1; // previously measured temperature
bool pid_iterate; // Whether the iterative process is used
long i_summ; // Ki summary multiplied by denominator
long power; // The power iterative multiplied by denominator
long Kp, Ki, Kd; // The PID algorithm coefficients multiplied by denominator
const byte denominator_p = 11; // The common coefficient denominator power of 2 (11 means divide by 2048)
};
void PID::resetPID(int temp) {
temp_h0 = 0;
power = 0;
i_summ = 0;
pid_iterate = false;
if ((temp > 0) && (temp < 1000))
temp_h1 = temp;
else
temp_h1 = 0;
}
int PID::changePID(uint8_t p, int k) {
switch(p) {
case 1:
if (k >= 0) Kp = k;
return Kp;
case 2:
if (k >= 0) Ki = k;
return Ki;
case 3:
if (k >= 0) Kd = k;
return Kd;
default:
break;
}
return 0;
}
long PID::reqPower(int temp_set, int temp_curr) {
if (temp_h0 == 0) {
// When the temperature is near the preset one, reset the PID and prepare iterative formula
if ((temp_set - temp_curr) < 30) {
if (!pid_iterate) {
pid_iterate = true;
power = 0;
i_summ = 0;
}
}
i_summ += temp_set - temp_curr; // first, use the direct formula, not the iterate process
power = Kp*(temp_set - temp_curr) + Ki*i_summ;
// If the temperature is near, prepare the PID iteration process
} else {
long kp = Kp * (temp_h1 - temp_curr);
long ki = Ki * (temp_set - temp_curr);
long kd = Kd * (temp_h0 + temp_curr - 2*temp_h1);
long delta_p = kp + ki + kd;
power += delta_p; // power kept multiplied by denominator!
}
if (pid_iterate) temp_h0 = temp_h1;
temp_h1 = temp_curr;
long pwr = power + (1 << (denominator_p-1)); // prepare the power to delete by denominator, round the result
pwr >>= denominator_p; // delete by the denominator
return pwr;
}
//--------------------- High frequency PWM signal calss on D9 pin ------------------------- ---------------
class FastPWM_D9 {
public:
FastPWM_D9() { }
void init(void);
void duty(uint8_t d) { OCR1A = d; }
uint8_t fanSpeed(void) { return OCR1A; }
};
void FastPWM_D9::init(void) {
pinMode(9, OUTPUT);
digitalWrite(9, LOW);
noInterrupts();
TCNT1 = 0;
TCCR1B = _BV(WGM13); // set mode as phase and frequency correct pwm, stop the timer
TCCR1A = 0;
ICR1 = 256;
TCCR1B = _BV(WGM13) | _BV(CS10); // Top value = ICR1, prescale = 1
TCCR1A |= _BV(COM1A1); // XOR D9 on OCR1A, detached from D10
OCR1A = 0; // Switch-off the signal on pin 9;
interrupts();
}
//--------------------- Hot air gun manager using total sine shape to power on the hardware ---------------
class HOTGUN : public PID {
public:
typedef enum { POWER_OFF, POWER_ON, POWER_FIXED, POWER_COOLING } PowerMode;
HOTGUN(uint8_t HG_sen_pin, uint8_t HG_pwr_pin);
void init(void);
bool isOn(void) { return (mode == POWER_ON || mode == POWER_FIXED); }
void setTemp(uint16_t temp) { temp_set = constrain(temp, 0, int_temp_max); }
uint16_t getTemp(void) { return temp_set; }
uint16_t getCurrTemp(void) { return h_temp.last(); }
uint16_t tempAverage(void) { return h_temp.average(); }
uint8_t powerAverage(void) { return h_power.average(); }
uint8_t appliedPower(void) { return actual_power; }
void setFanSpeed(uint8_t f) { fan_speed = constrain(f, min_working_fan, max_fan_speed); }
uint8_t getFanSpeed(void) { return fan_speed; }
uint16_t tempDispersion(void) { return h_temp.dispersion(); }
bool isCold(void) { return h_temp.average() < temp_gun_cold; }
bool areExternalInterrupts(void) { return millis() - last_period < period * 15; }
uint8_t avgPowerPcnt(void);
void switchPower(bool On);
void fixPower(uint8_t Power); // Set the specified power to the the hot gun
void keepTemp(void);
uint8_t getMaxFixedPower(void) { return max_fix_power; }
bool syncCB(void); // Return true at the end of the power period
private:
bool isGunConnected(void) { return true; }
void shutdown(void);
uint16_t emulateTemp(void); // To debug the project, simulate the Hot Air Gun heating process
FastPWM_D9 hg_fan;
uint16_t temp_set; // The preset temperature of the hot air gun (internal units)
uint8_t fan_speed;
uint8_t sen_pin;
uint8_t gun_pin;
HISTORY h_power; // The history queue of power applied values
HISTORY h_temp; // The history queue of the temperature
EMP_AVERAGE e_sensor; // The exponential average of sensor data
volatile uint8_t cnt;
volatile uint8_t actual_power;
volatile bool active;
uint8_t actual_fan = 0; // Power applied to the fan (can be turned off)
uint8_t fix_power = 0; // Fixed power value of the Hot Air Gun (or zero if off)
PowerMode mode = POWER_OFF;
bool chill; // To chill the hot gun
volatile uint32_t last_period; // The time in ms when the counter reset
const uint8_t period = 100;
const uint16_t int_temp_max = 900;
const uint8_t max_fix_power = 70;
const uint8_t max_power = 99;
const uint16_t min_fan_speed = 30;
const uint16_t max_fan_speed = 255;
const uint16_t max_cool_fan = 220;
const uint16_t temp_gun_cold = 20;
const uint8_t e_sensor_length = 40; // Exponential average length of sensor data
};
HOTGUN::HOTGUN(uint8_t HG_sen_pin, uint8_t HG_pwr_pin) {
sen_pin = HG_sen_pin;
gun_pin = HG_pwr_pin;
}
void HOTGUN::init(void) {
cnt = 0;
fan_speed = 0;
actual_power = 0;
fix_power = 0;
active = false;
chill = false;
last_period = 0;
pinMode(sen_pin, INPUT);
pinMode(gun_pin, OUTPUT);
digitalWrite(gun_pin, LOW);
hg_fan.init();
h_temp.init();
e_sensor.length(e_sensor_length);
resetPID();
}
bool HOTGUN::syncCB(void) {
if (++cnt >= period) {
cnt = 0;
last_period = millis(); // Save the current time to check the external interrupts
if (!active && (actual_power > 0)) {
digitalWrite(gun_pin, HIGH);
active = true;
}
} else if (cnt >= actual_power) {
if (active) {
digitalWrite(gun_pin, LOW);
active = false;
}
}
if (!active) {
e_sensor.update(analogRead(sen_pin));
}
return (cnt == 0); // End of the Power period (period AC voltage shapes)
}
void HOTGUN::switchPower(bool On) {
switch (mode) {
case POWER_OFF:
if (hg_fan.fanSpeed() == 0) { // Not power supplied to the Fan
if (On) // !FAN && On
mode = POWER_ON;
} else {
if (On) {
if (isGunConnected()) { // FAN && On && connected
mode = POWER_ON;
} else { // FAN && On && !connected
shutdown();
}
} else {
if (isGunConnected()) { // FAN && !On && connected
if (isCold()) { // FAN && !On && connected && cold
shutdown();
} else { // FAN && !On && connected && !cold
mode = POWER_COOLING;
}
}
}
}
break;
case POWER_ON:
if (!On) {
mode = POWER_COOLING;
}
break;
case POWER_FIXED:
if (hg_fan.fanSpeed()) {
if (On) { // FAN && On
mode = POWER_ON;
} else { // FAN && !On
if (isGunConnected()) { // FAN && !On && connected
if (isCold()) { // FAN && !On && connected && cold
shutdown();
} else { // FAN && !On && connected && !cold
mode = POWER_COOLING;
}
}
}
} else { // !FAN
if (!On) { // !FAN && !On
shutdown();
}
}
break;
case POWER_COOLING:
if (hg_fan.fanSpeed()) {
if (On) { // FAN && On
if (isGunConnected()) { // FAN && On && connected
mode = POWER_ON;
} else { // FAN && On && !connected
shutdown();
}
} else { // FAN && !On
if (isGunConnected()) {
if (isCold()) { // FAN && !On && connected && cold
shutdown();
}
} else { // FAN && !On && !connected
shutdown();
}
}
} else {
if (On) { // !FAN && On
mode = POWER_ON;
}
}
}
h_power.init();
}
// This routine is used to keep the hot air gun temperature near required value
void HOTGUN::keepTemp(void) {
//uint16_t temp = analogRead(sen_pin); // Check the hot air gun temperature
//uint16_t temp = emulateTemp();
uint16_t temp = e_sensor.read(); // Average value of the hot air gun temperature
h_temp.put(temp);
...
This file has been truncated, please download it to see its full contents.
Github
https://github.com/ManojBR105/ARDUINO-SMD-REWORK-STATIONhttps://github.com/ManojBR105/ARDUINO-SMD-REWORK-STATIONSchematics
 This is the power supply circuit to provide necessary voltage for the controller.
This is the power supply circuit to provide necessary voltage for the controller.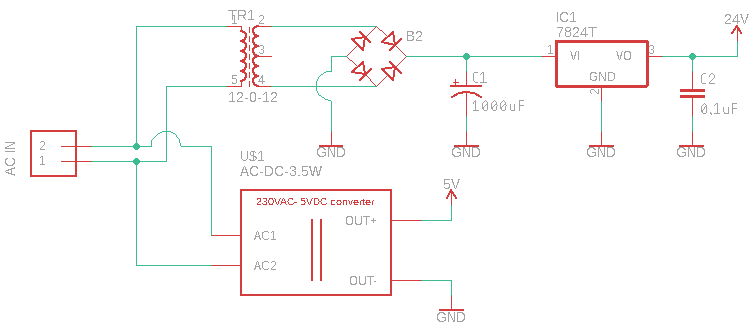 hot_air_gunsch_l627KvauMg.sch
hot_air_gunsch_l627KvauMg.schManufacturing process
- Building an Outdoor Weather Station with Raspberry Pi 2 and ADS‑WS1
- Advanced Weather Station v2.0: Real‑Time Temperature, Pressure, Humidity & Altitude Monitoring
- Build a 20 kHz Arduino Oscilloscope on a Nokia 5110 LCD – Easy DIY Guide
- DIY Arduino Nano Oscilloscope (10 Hz–50 kHz) with 128×64 LCD
- Build an AI LCD Companion: Your Interactive Buddy
- Portable Temperature Monitoring Station – Accurate TMP36 & LCD Display
- Build a Reliable Arduino Weather Station with DHT Sensors
- Arduino Temperature Sensor Project: Read, Convert, and Display Fahrenheit
- Build an Ultra‑Sensitive EMF Detector with Arduino Nano
- Arduino LCD Thermostat: Simple & Reliable Temperature Control